| Citation: | WU H B,SONG C Y,ZHOU S X. Dynamically changeable human-robot collaborative assembly based on limb motion prediction[J]. Journal of Beijing University of Aeronautics and Astronautics,2025,51(10):3243-3252 (in Chinese) doi: 10.13700/j.bh.1001-5965.2023.0543

|
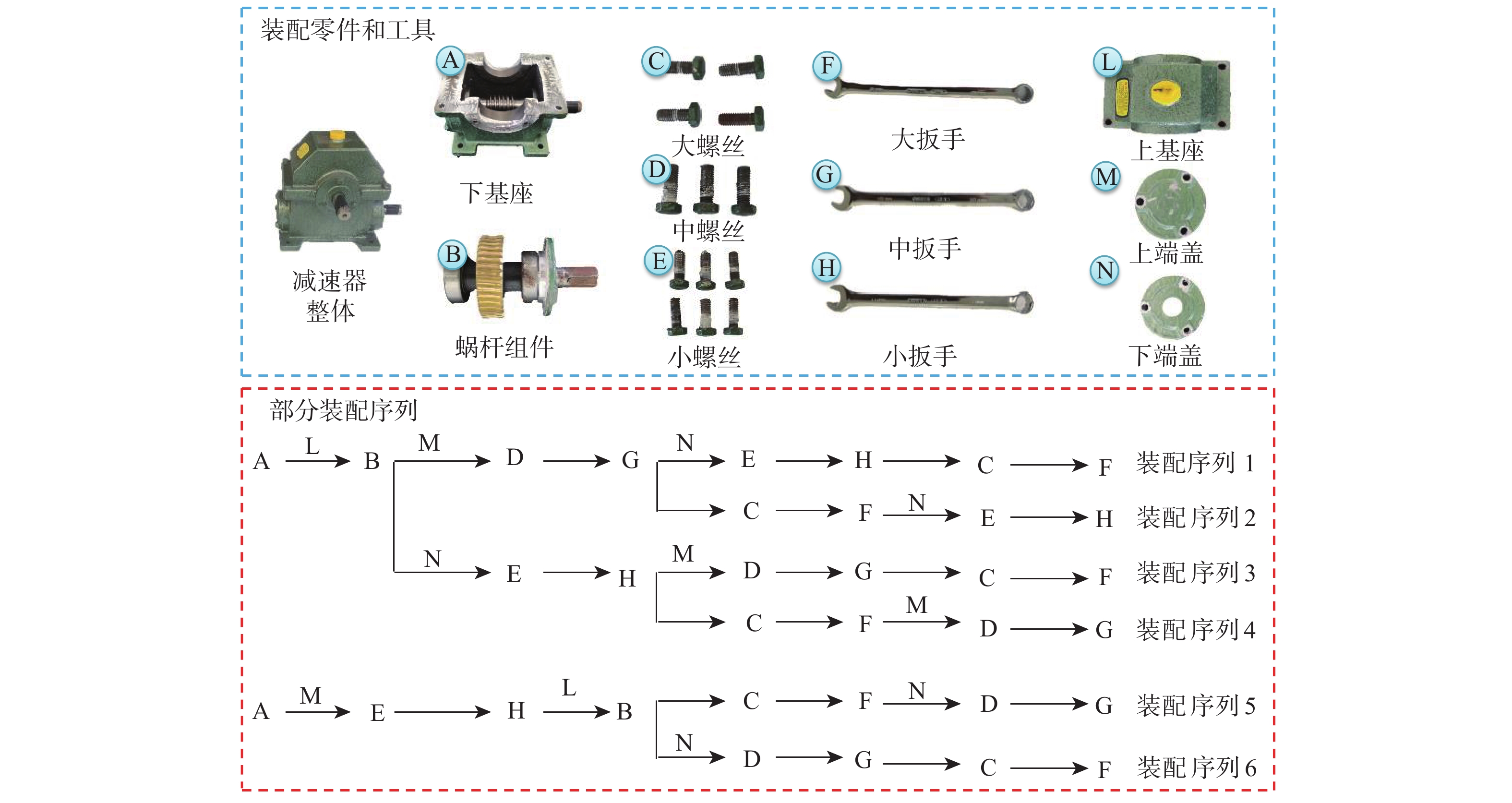
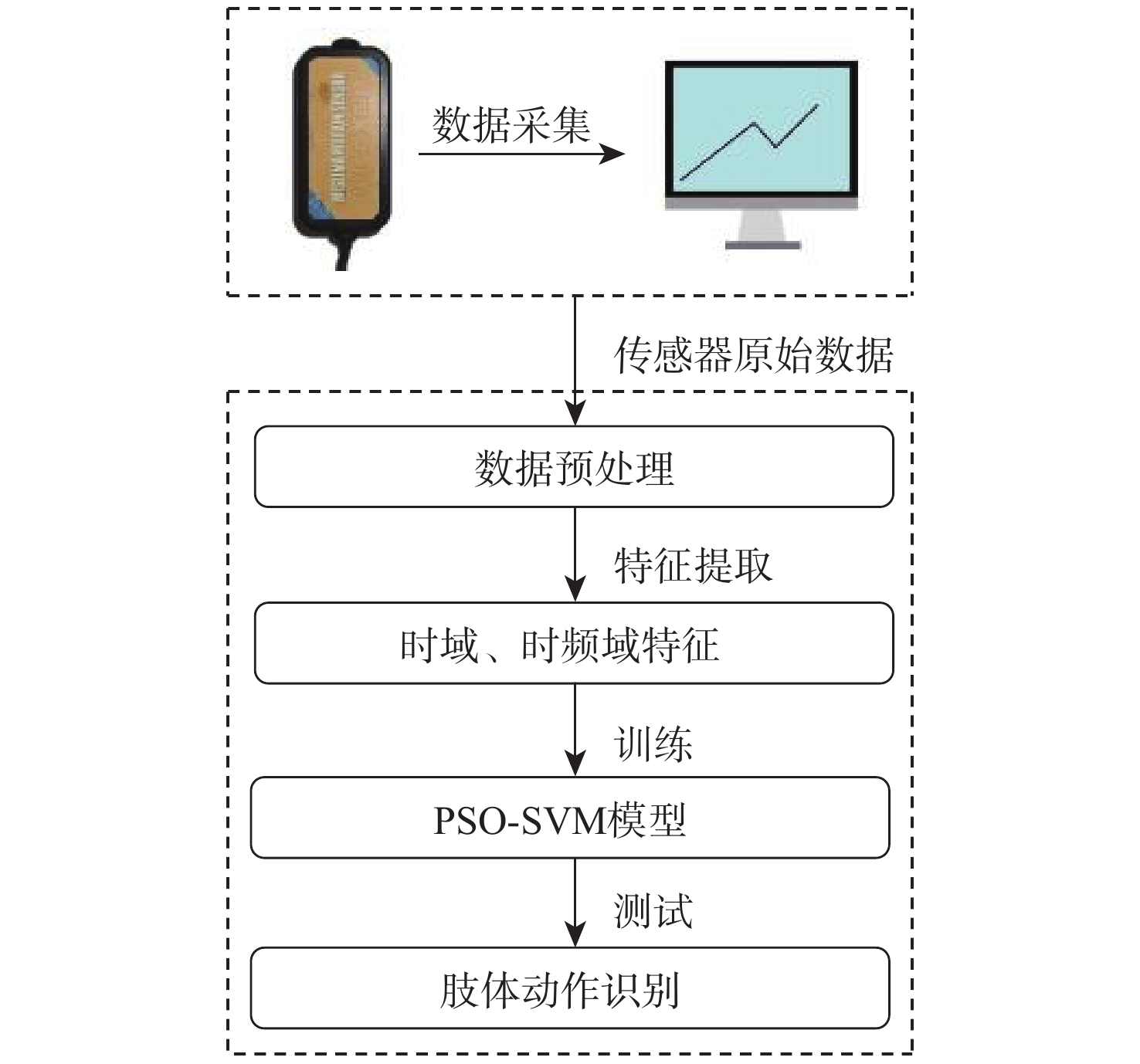
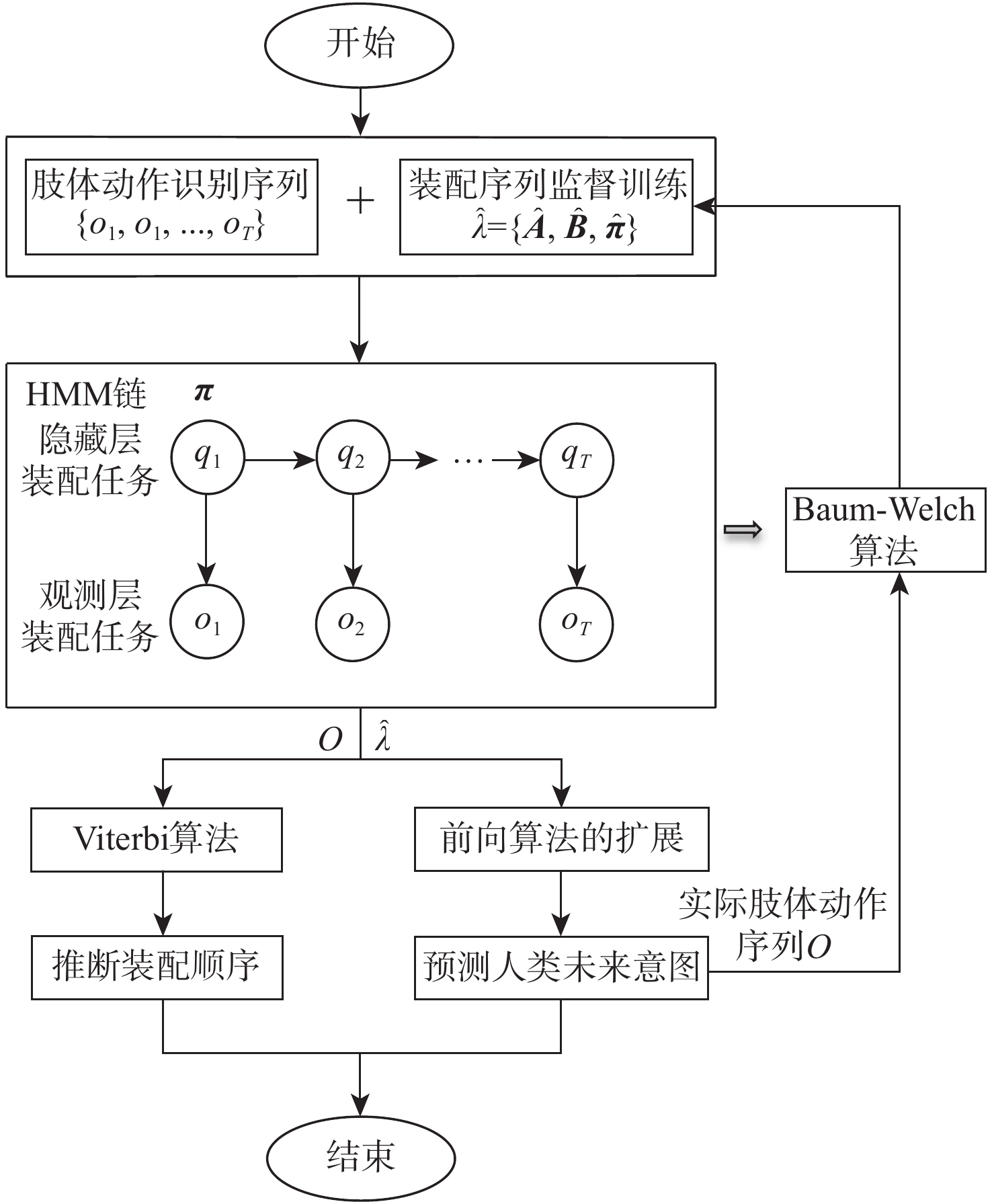
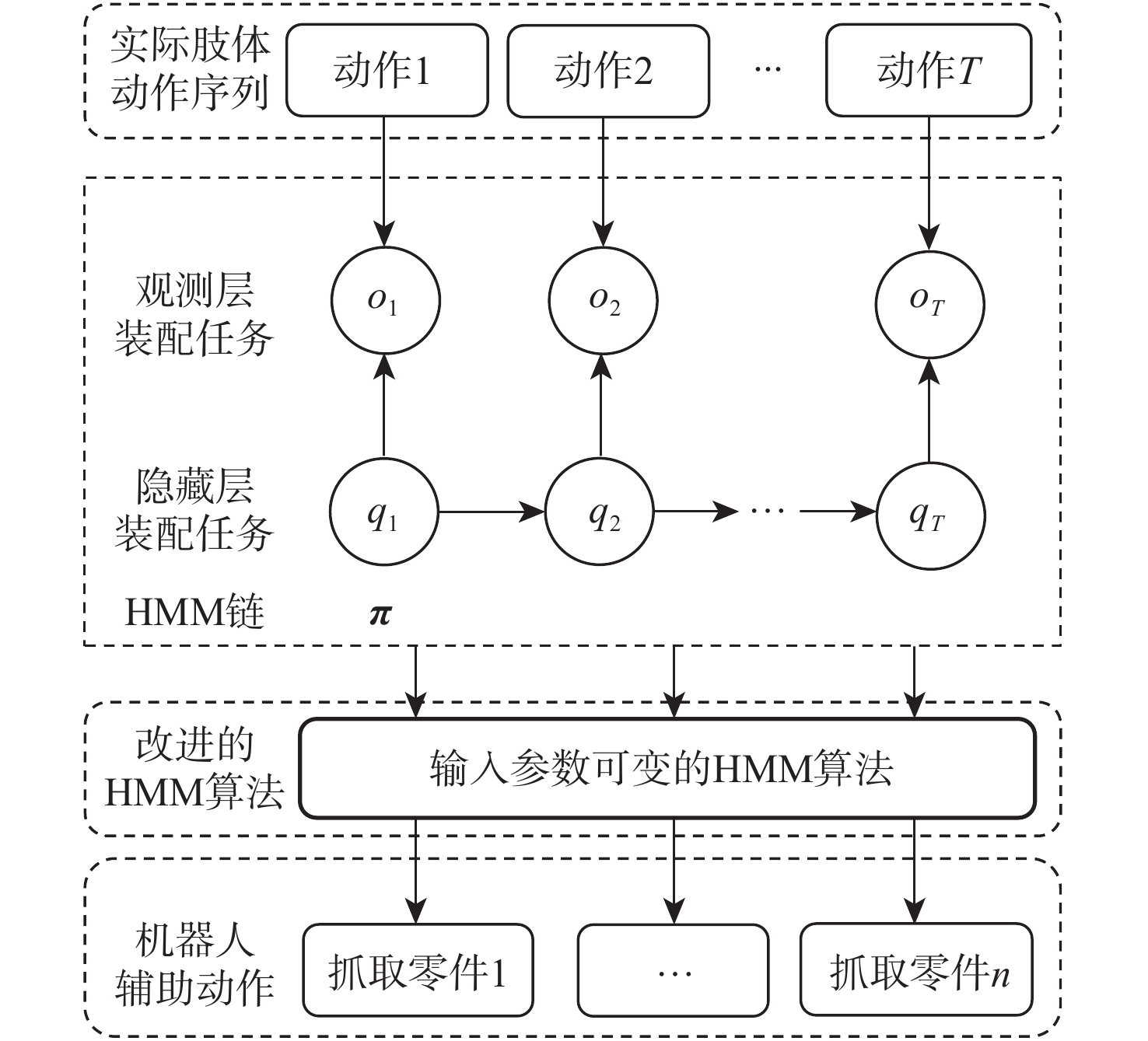
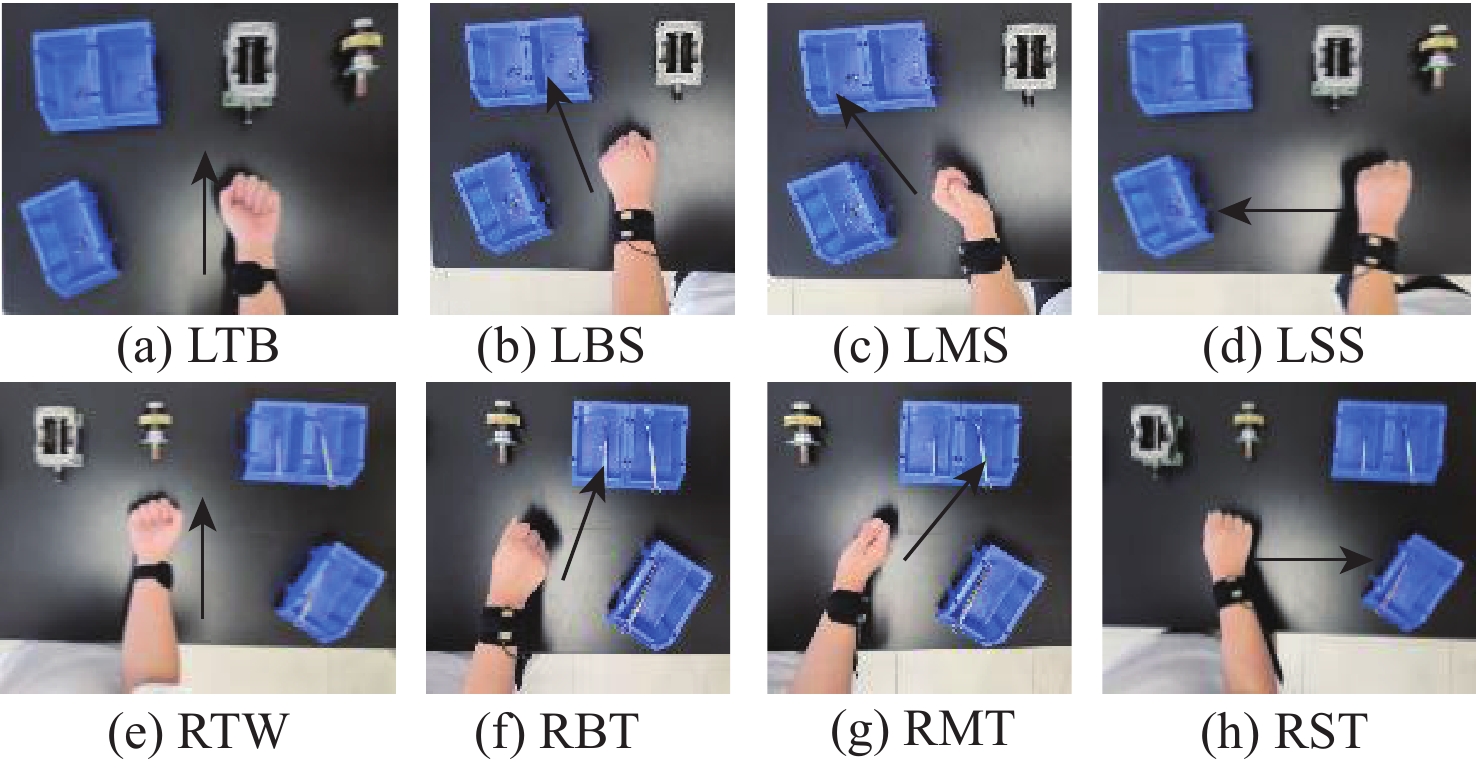
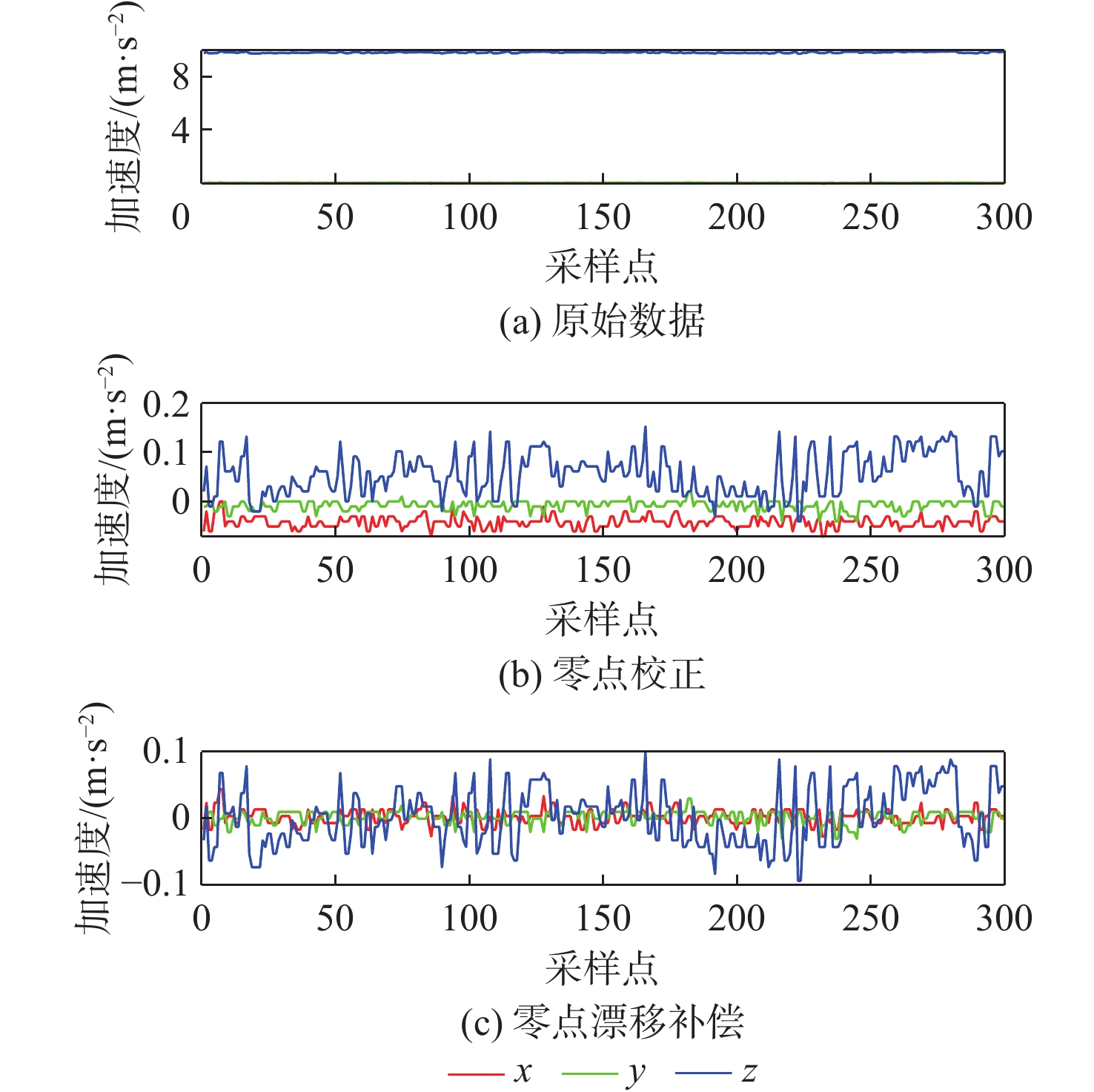
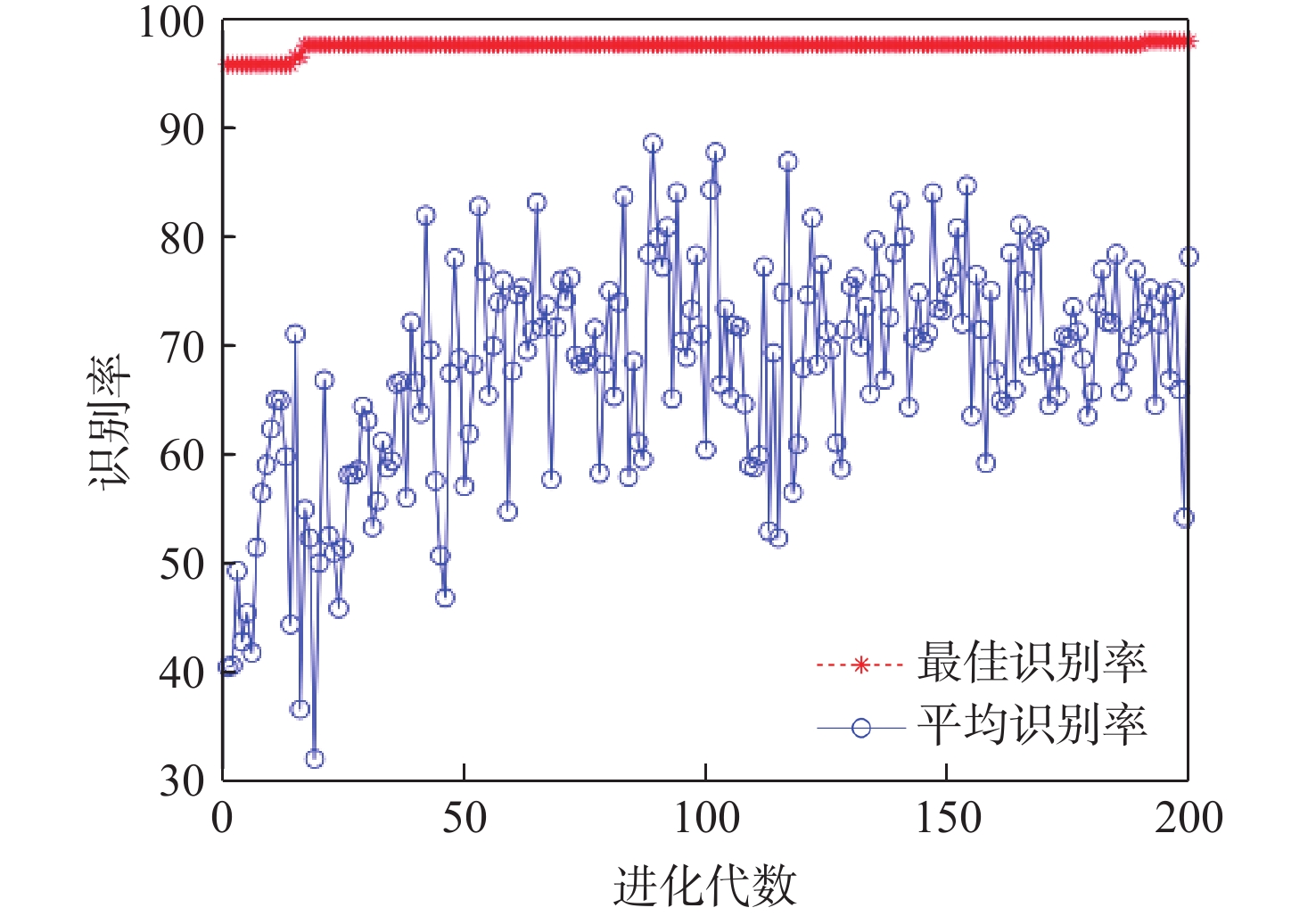
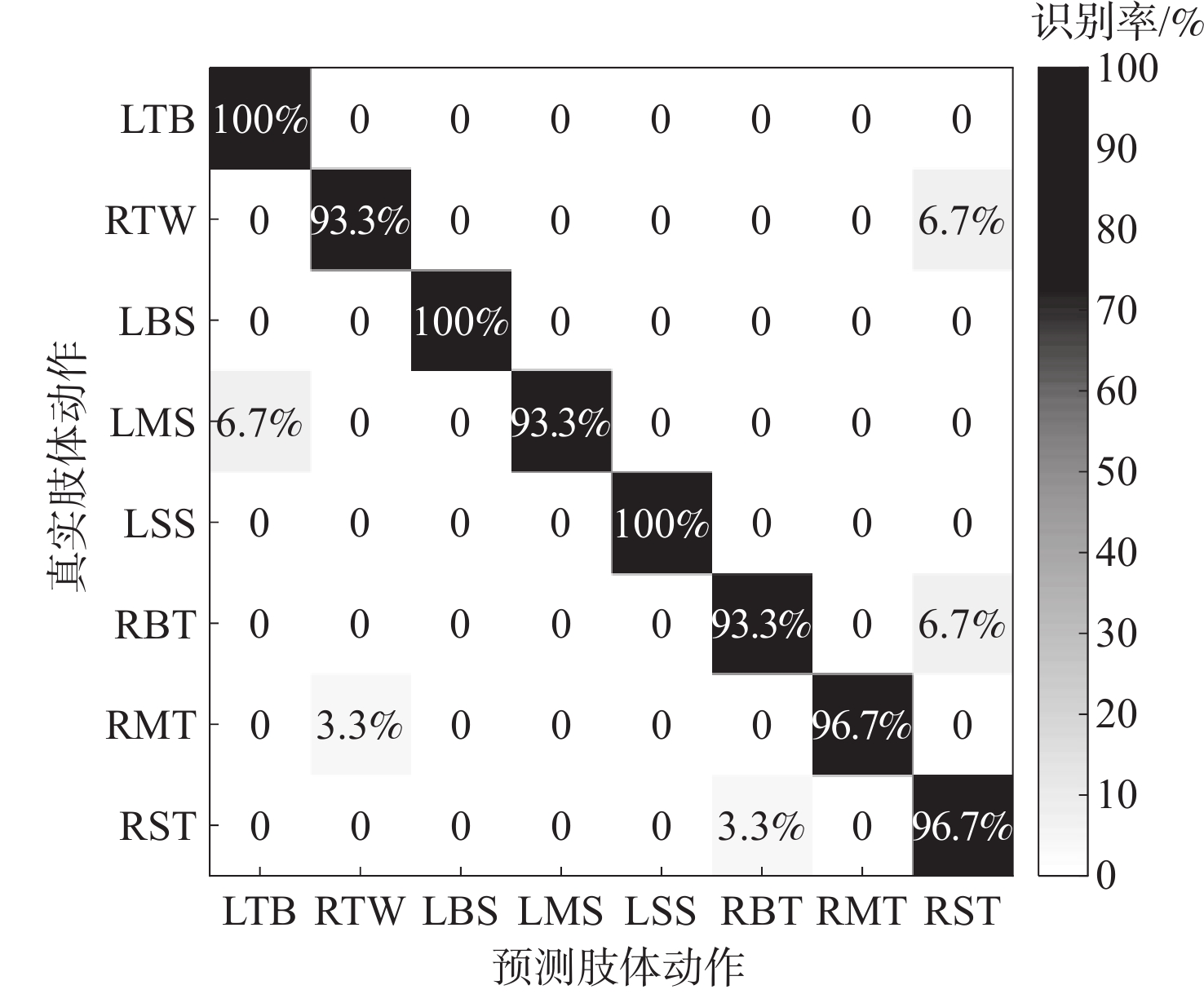
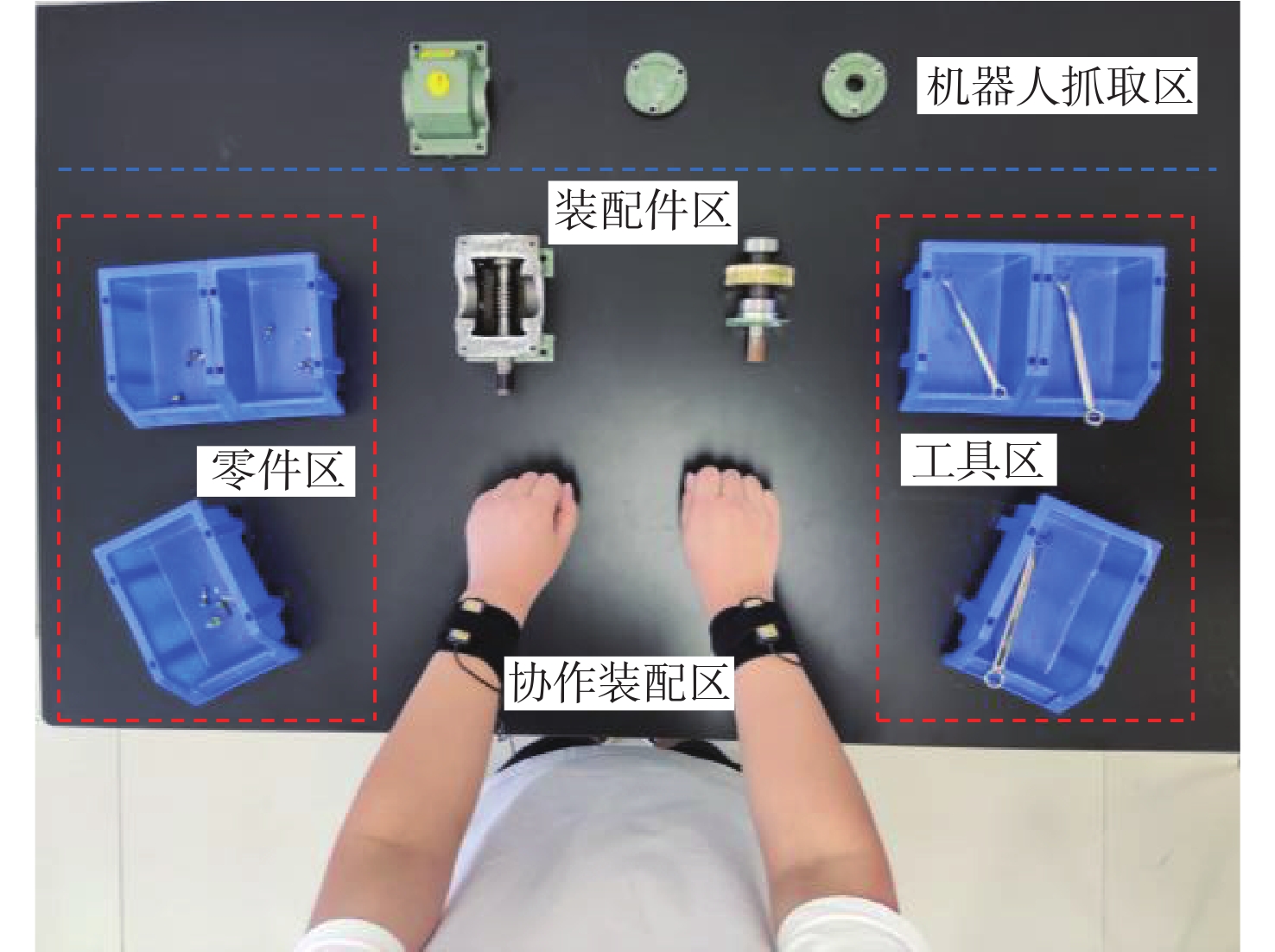
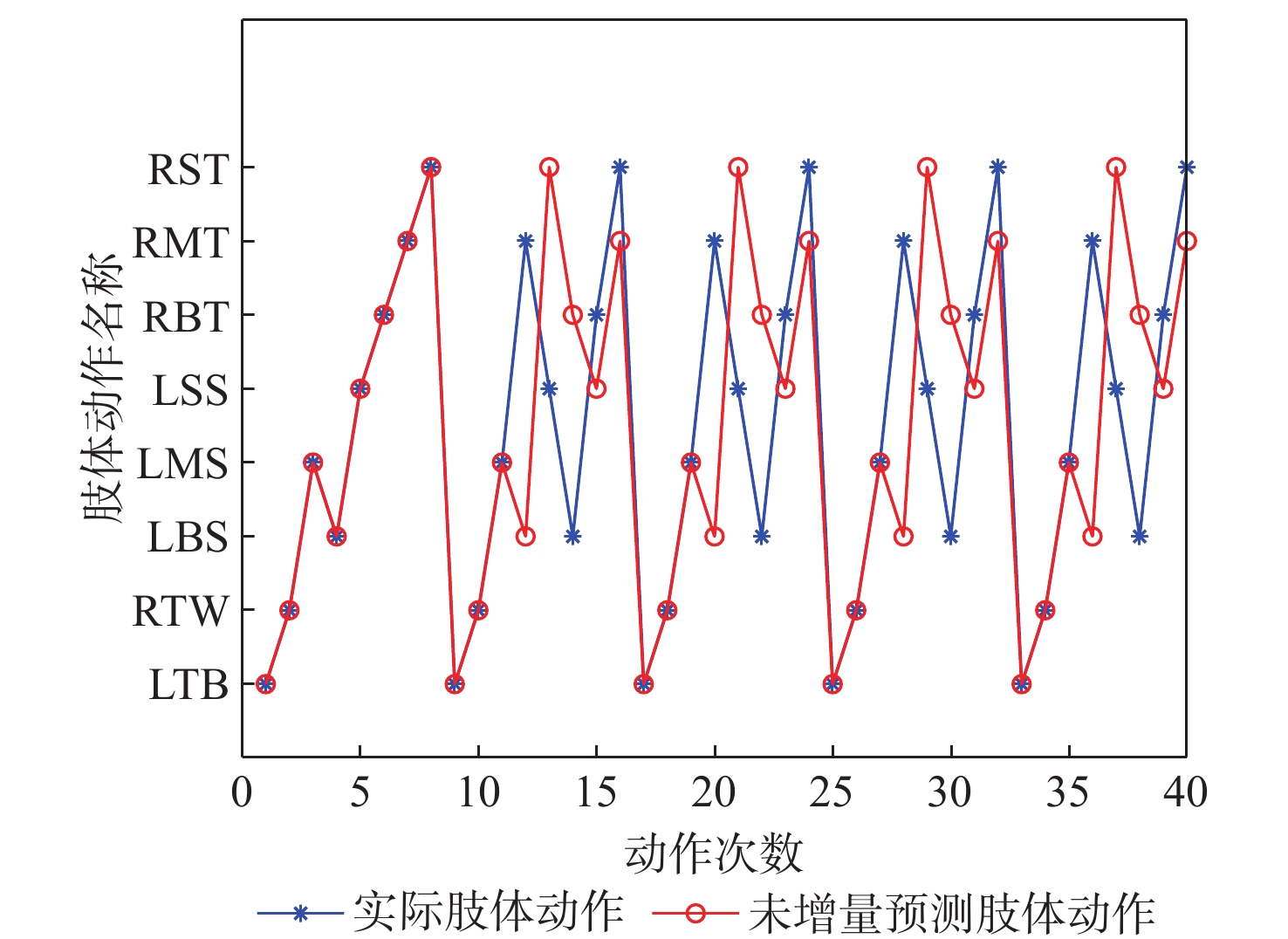
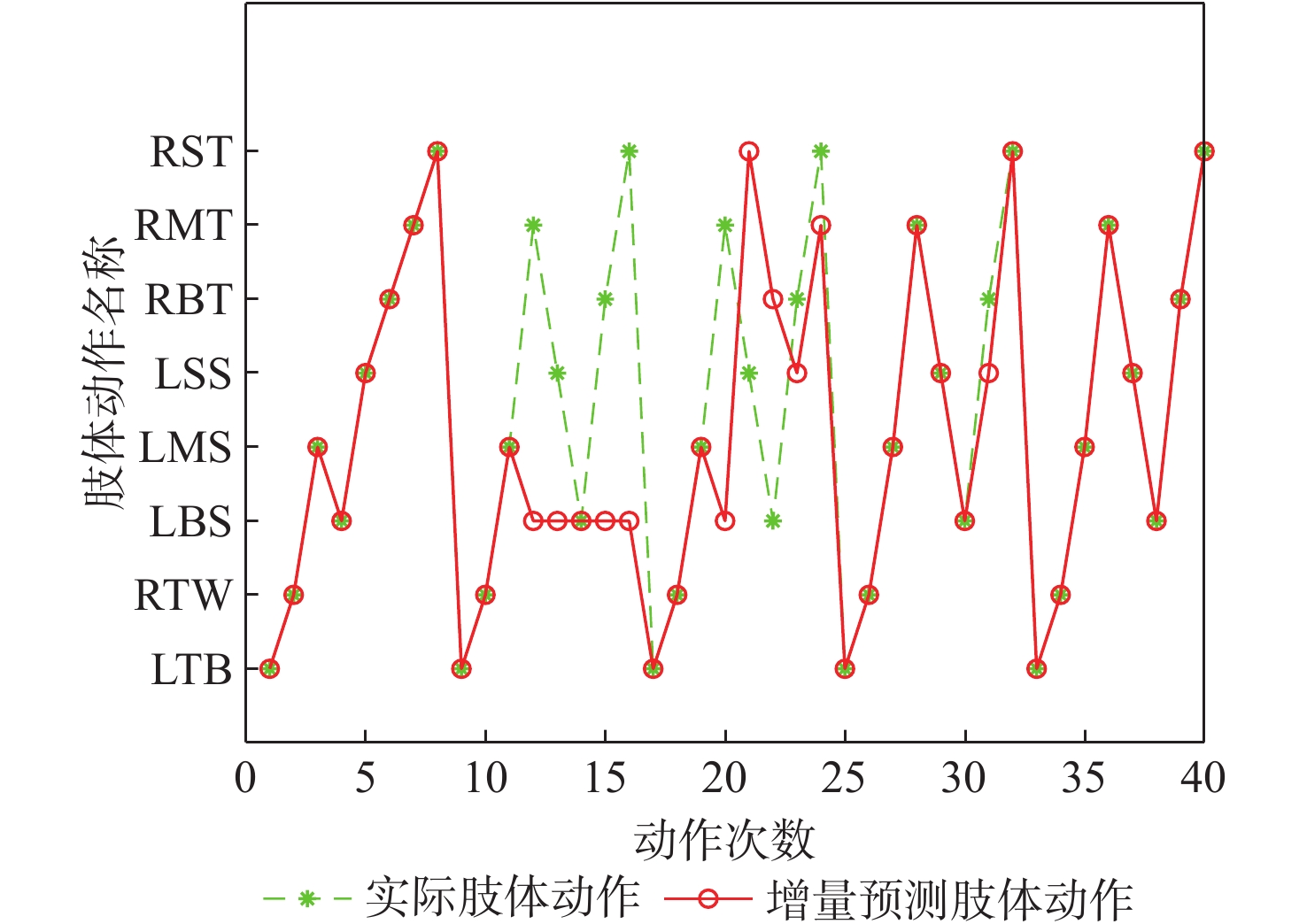
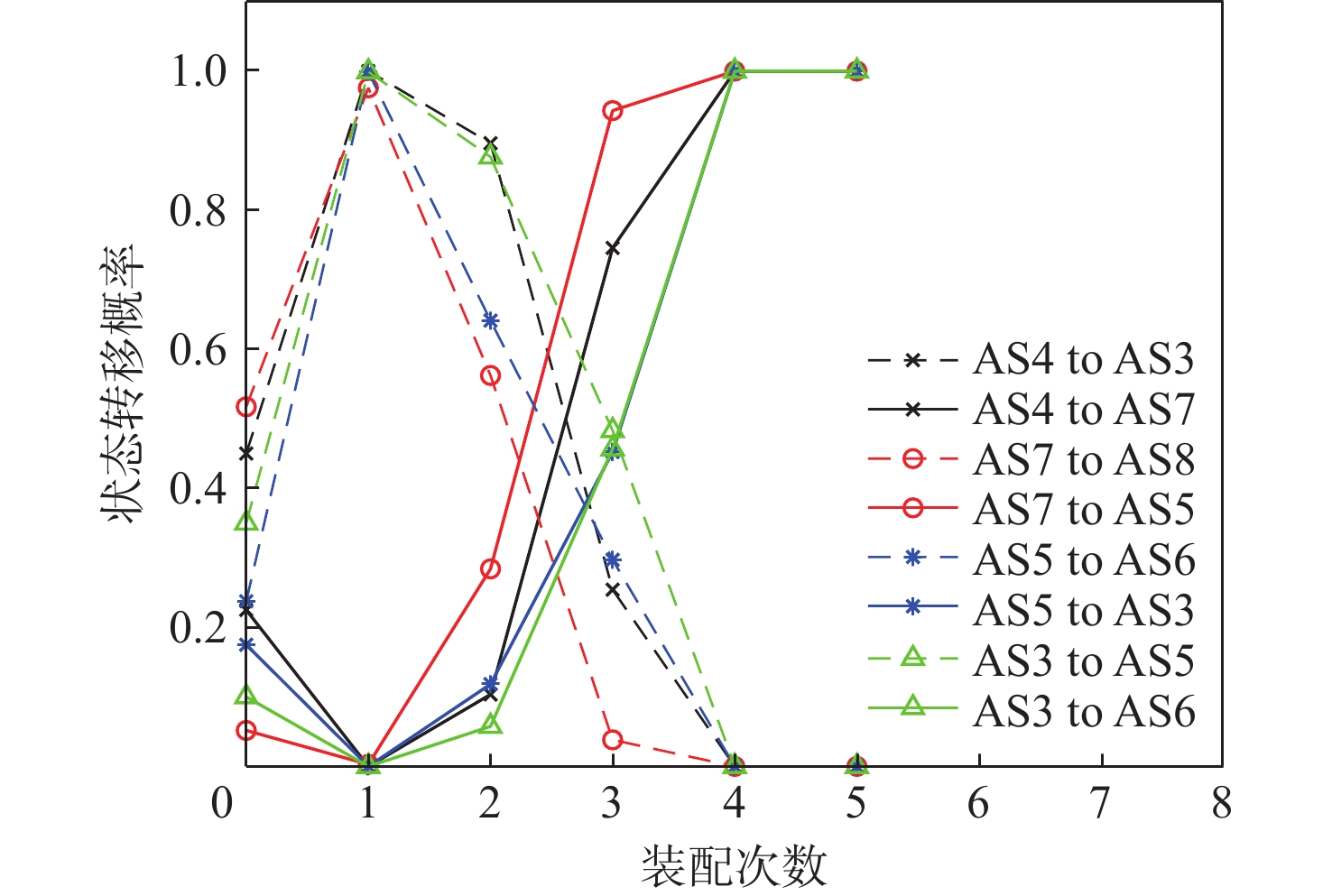
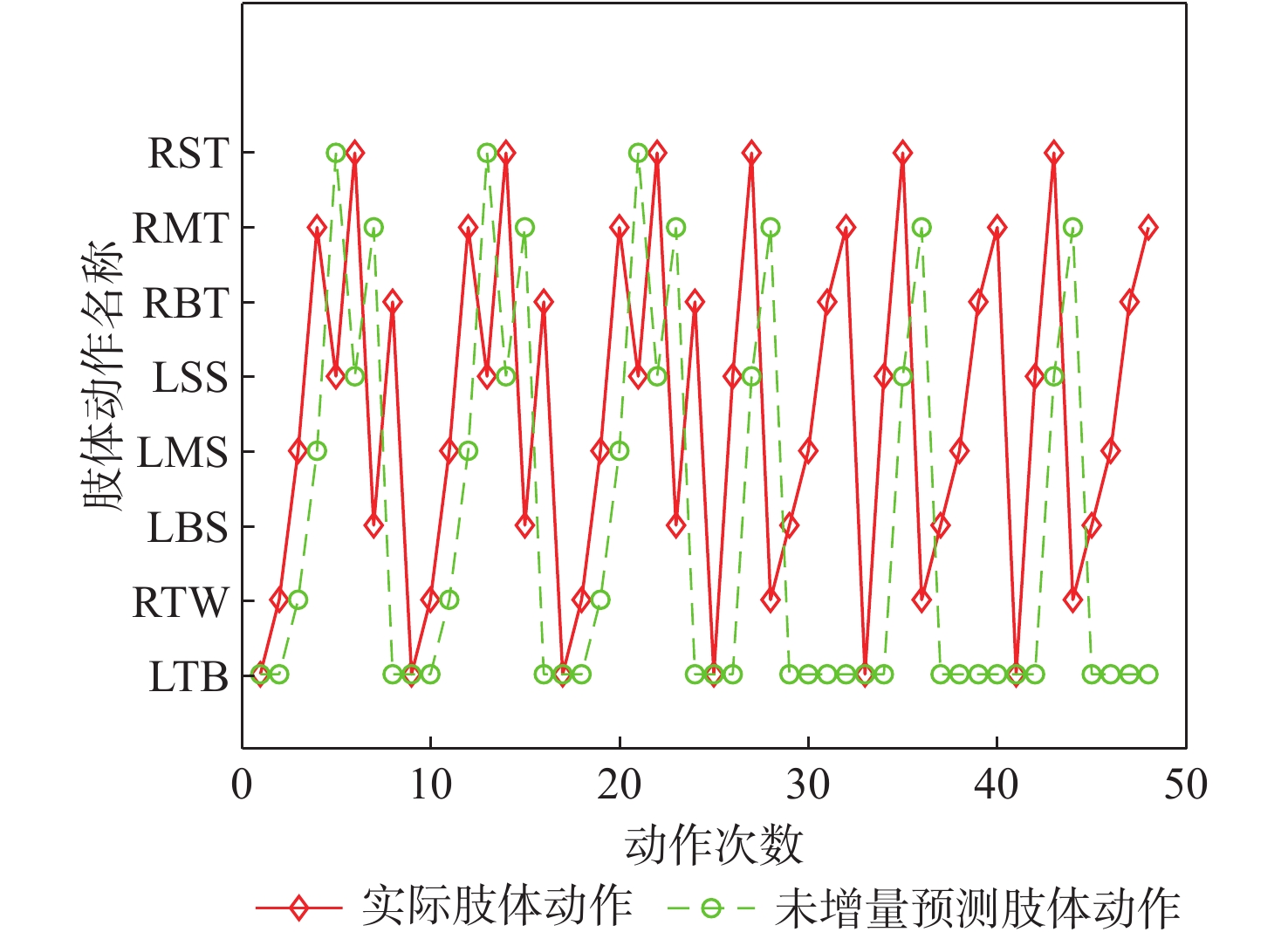
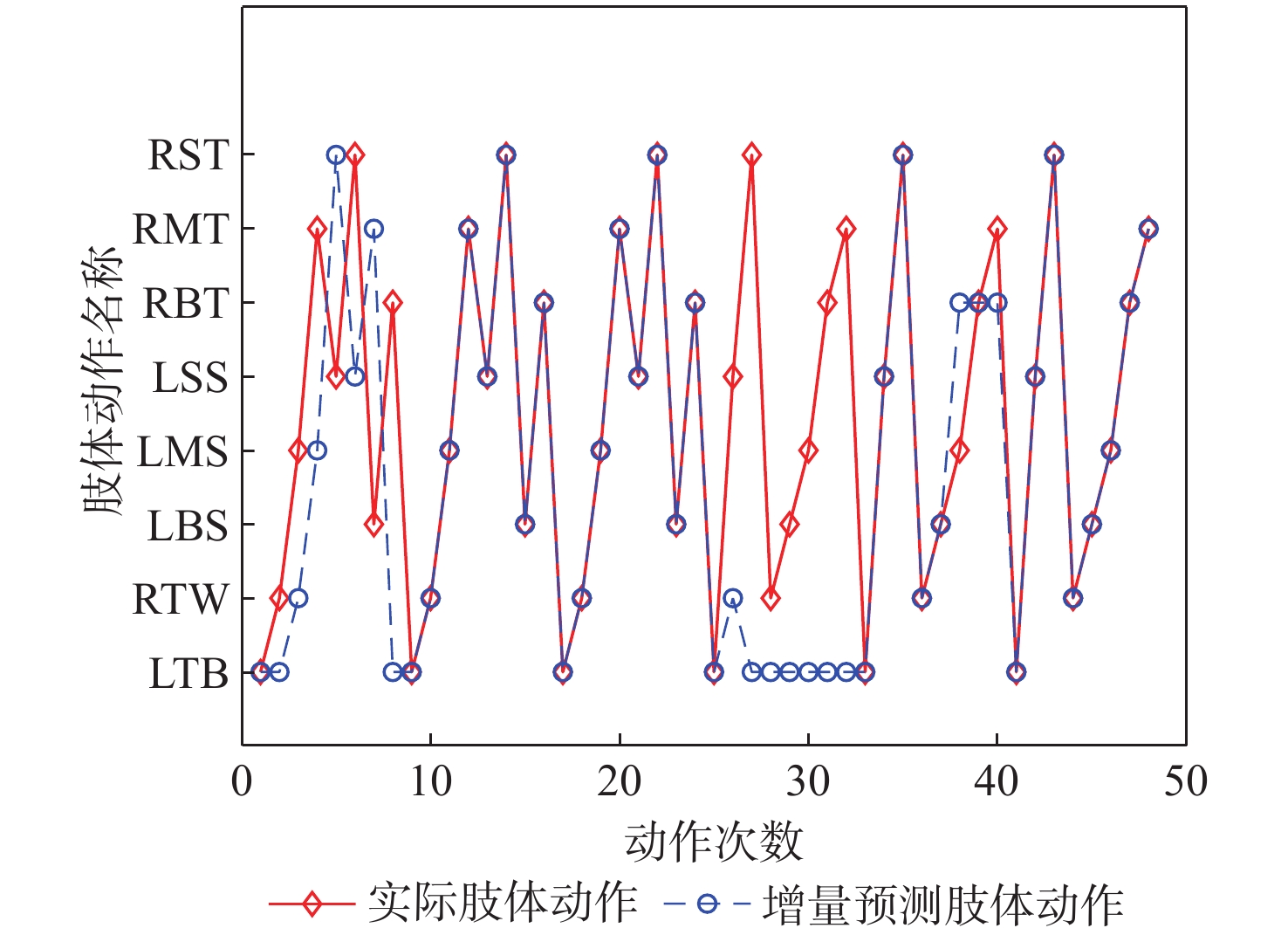
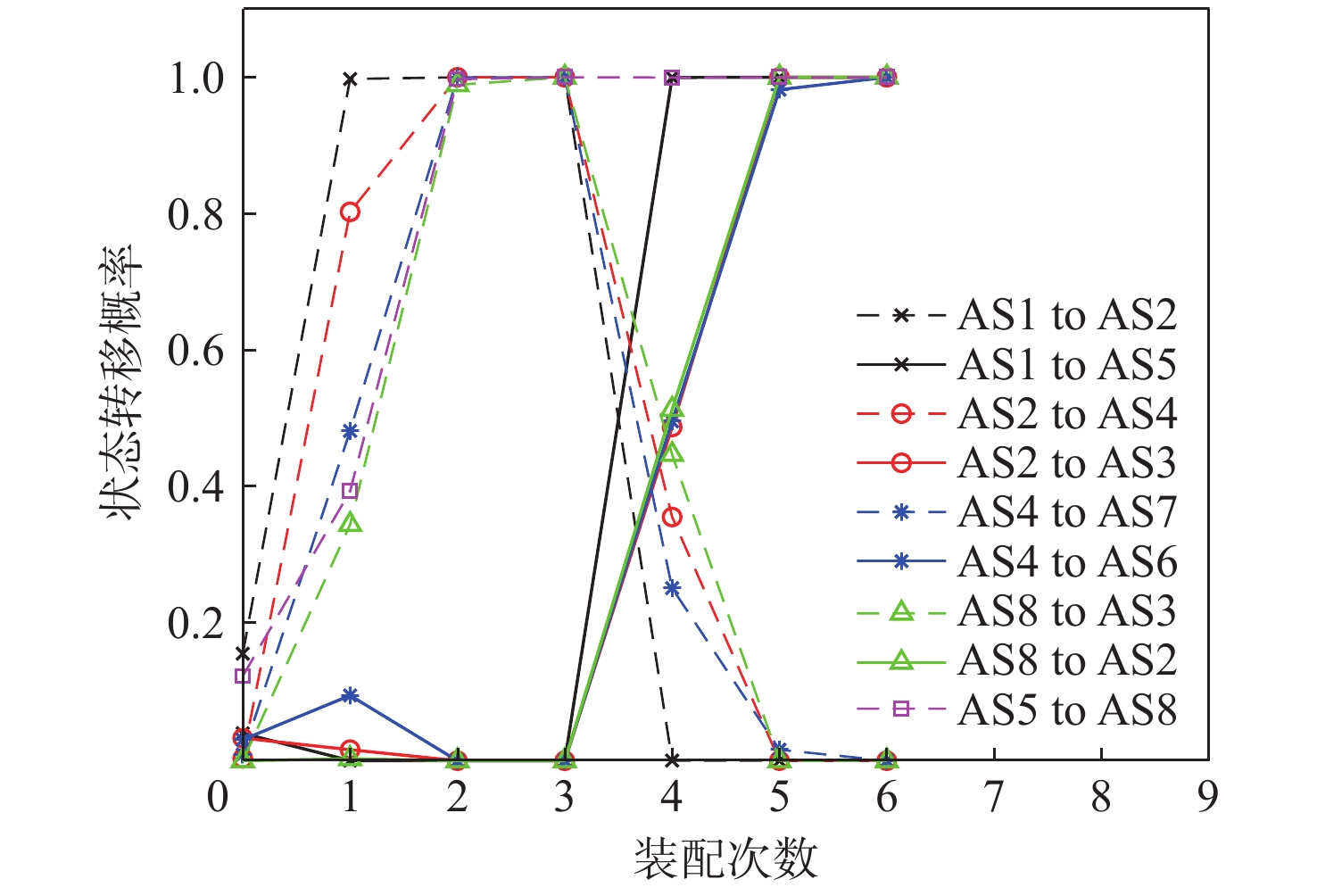
Human-robot collaborative assembly is necessary to ensure that the assembly process goes successfully in some complex assembly areas where it is challenging to rely entirely on robots to complete the assembly. However, in the process of human-robot collaboration, the robot cannot respond to different human operations. We propose a dynamic variable human-robot collaborative assembly scheme to address the challenges in complex assembly domains. The scheme achieves dynamic variability in the assembly process by recognizing and predicting the operator’s limb movements, and the robot responds accordingly. We use an inertial measurement unit (IMU) to collect motion information and propose a particle swarm optimization (PSO) support vector machine (SVM) algorithm for accurate limb motion detection. In addition, we introduce a parameter-variable hidden Markov model (HMM) to predict action sequences in real-time. This allows the robot to infer the operator’s future intentions. The decelerator human-robot collaborative assembly experiment showed that the suggested approach obtained an average limb motion recognition rate of 96.7%. It was also able to effectively predict operator actions, enabling dynamic human-robot collaborative assembly with adjustable assembly sequences. This significantly enhanced the adaptability of the assembly system and reduced the complexity of human-robot collaborative assembly.

| [1] |
ZHOU J, LI P G, ZHOU Y H, et al. Toward new-generation intelligent manufacturing[J]. Engineering, 2018, 4(1): 11-20. doi: 10.1016/j.eng.2018.01.002
|
| [2] |
黄海丰, 刘培森, 李擎, 等. 协作机器人智能控制与人机交互研究综述[J]. 工程科学学报, 2022, 44(4): 780-791. doi: 10.3321/j.issn.1001-053X.2022.4.bjkjdxxb202204028
HUANG H F, LIU P S, LI Q, et al. Review: intelligent control and human-robot interaction for collaborative robots[J]. Chinese Journal of Engineering, 2022, 44(4): 780-791(in Chinese). doi: 10.3321/j.issn.1001-053X.2022.4.bjkjdxxb202204028
|
| [3] |
WANG P, LIU H Y, WANG L H, et al. Deep learning-based human motion recognition for predictive context-aware human-robot collaboration[J]. CIRP Annals, 2018, 67(1): 17-20. doi: 10.1016/j.cirp.2018.04.066
|
| [4] |
常玉青. 人机协作中基于多Kinect的人体行为识别研究[D]. 长春: 吉林大学, 2018: 5-7.
CHANG Y Q. Research on human behavior recognition based on multi-Kinect in human-computer cooperation[D]. Changchun: Jilin University, 2018: 5-7(in Chinese).
|
| [5] |
LU G L, ZHOU Y Q, LI X Y, et al. Efficient action recognition via local position offset of 3D skeletal body joints[J]. Multimedia Tools and Applications, 2016, 75(6): 3479-3494. doi: 10.1007/s11042-015-2448-1
|
| [6] |
SHI M, YANG C Y, ZHANG D L. A novel human-machine collaboration model of an ankle joint rehabilitation robot driven by EEG signals[J]. Mathematical Problems in Engineering, 2021, 2021(1): 5564235.
|
| [7] |
ÇOBAN M, GELEN G. Realization of human-robot collaboration in hybrid assembly systems by using wearable technology[C]//Proceedings of the 6th International Conference on Control Engineering & Information Technology. Piscataway: IEEE Press, 2018: 1-6.
|
| [8] |
SYED A S, SHERHAN Z, SHEHRAM M, et al. Using wearable sensors for human activity recognition in logistics: a comparison of different feature sets and machine learning algorithms[J]. International Journal of Advanced Computer Science and Applications, 2020, 11(9): 644-649.
|
| [9] |
WANG W T, LI R, DIEKEL Z M, et al. Controlling object hand-over in human-robot collaboration via natural wearable sensing[J]. IEEE Transactions on Human Machine Systems, 2019, 49(1): 59-71. doi: 10.1109/THMS.2018.2883176
|
| [10] |
陈友东, 刘嘉蕾, 胡澜晓. 人机协作中人的动作终点预测[J]. 北京麻豆精品秘 国产传媒学报, 2019, 45(1): 35-43.
CHEN Y D, LIU J L, HU L X. Human motion end point prediction in human-robot collaboration[J]. Journal of Beijing University of Aeronautics and Astronautics, 2019, 45(1): 35-43(in Chinese).
|
| [11] |
LIU Z T, LIU Q, XU W J, et al. Deep learning-based human motion prediction considering context awareness for human-robot collaboration in manufacturing[J]. Procedia CIRP, 2019, 83: 272-278. doi: 10.1016/j.procir.2019.04.080
|
| [12] |
KWON W Y, SUH I H. Planning of proactive behaviors for human-robot cooperative tasks under uncertainty[J]. Knowledge-Based Systems, 2014, 72: 81-95. doi: 10.1016/j.knosys.2014.08.021
|
| [13] |
HAWKINS K P, VO N, BANSAL S, et al. Probabilistic human action prediction and wait-sensitive planning for responsive human-robot collaboration[C]//Proceedings of the 13th IEEE-RAS International Conference on Humanoid Robots. Piscataway: IEEE Press, 2013: 499-506.
|
| [14] |
LIU H Y, WANG L H. Human motion prediction for human-robot collaboration[J]. Journal of Manufacturing Systems, 2017, 44: 287-294. doi: 10.1016/j.jmsy.2017.04.009
|
| [15] |
CRAMER M, CRAMER J, KELLENS K, et al. Towards robust intention estimation based on object affordance enabling natural human-robot collaboration in assembly tasks[J]. Procedia CIRP, 2018, 78: 255-260. doi: 10.1016/j.procir.2018.09.069
|
| [16] |
ZANCHETTIN A M, CASALINO A, PIRODDI L, et al. Prediction of human activity patterns for human-robot collaborative assembly tasks[J]. IEEE Transactions on Industrial Informatics, 2018, 15(7): 3934-3942.
|
| [17] |
祁亨年. 支持向量机及其应用研究综述[J]. 计算机工程, 2004, 30(10): 6-9.
QI H N. Support vector machines and application research overview[J]. Computer Engineering, 2004, 30(10): 6-9(in Chinese).
|
| [18] |
CHANG C C, LIN C J. LIBSVM[J]. ACM Transactions on Intelligent Systems and Technology, 2011, 2(3): 1-27.
|
| [19] |
YE M Y, YAN X A, JIA M P. Rolling bearing fault diagnosis based on VMD-MPE and PSO-SVM[J]. Entropy, 2021, 23(6): 762. doi: 10.3390/e23060762
|
| [20] |
TONG L N, SONG Q J, GE Y J, et al. HMM-based human fall detection and prediction method using tri-axial accelerometer[J]. IEEE Sensors Journal, 2013, 13(5): 1849-1856. doi: 10.1109/JSEN.2013.2245231
|

Figures(16) / Tables(4)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@cq5520.com
Supported by:
Beijing Renhe Information Technology Co., Ltd.





 DownLoad:
DownLoad: