| Citation: | LI Honggang, WANG Yunpeng, LIAO Yaping, et al. Perception and control method of driverless mining vehicle[J]. Journal of Beijing University of Aeronautics and Astronautics, 2019, 45(11): 2335-2344. doi: 10.13700/j.bh.1001-5965.2019.0521(in Chinese)

|
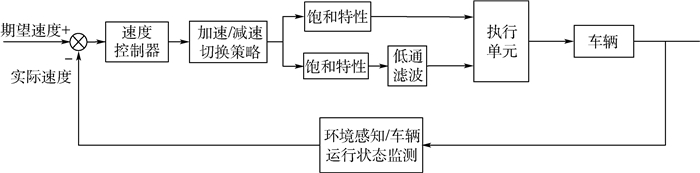
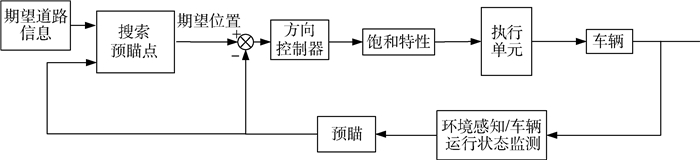
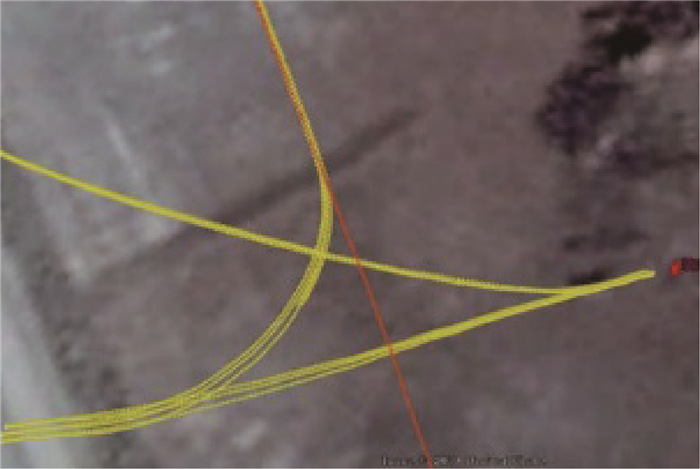
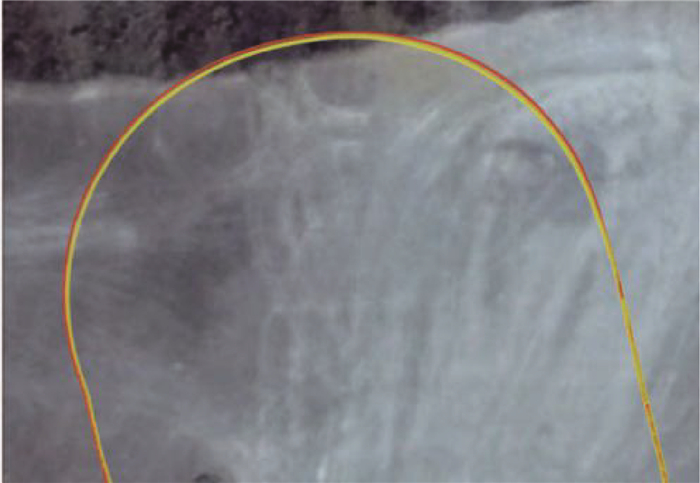
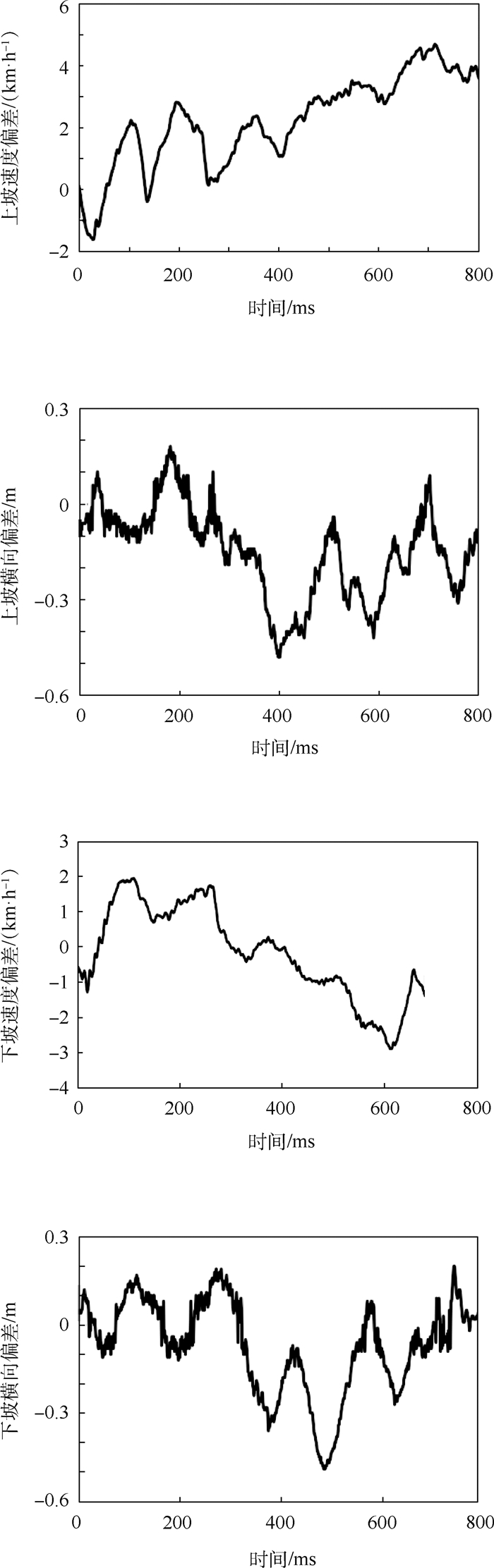
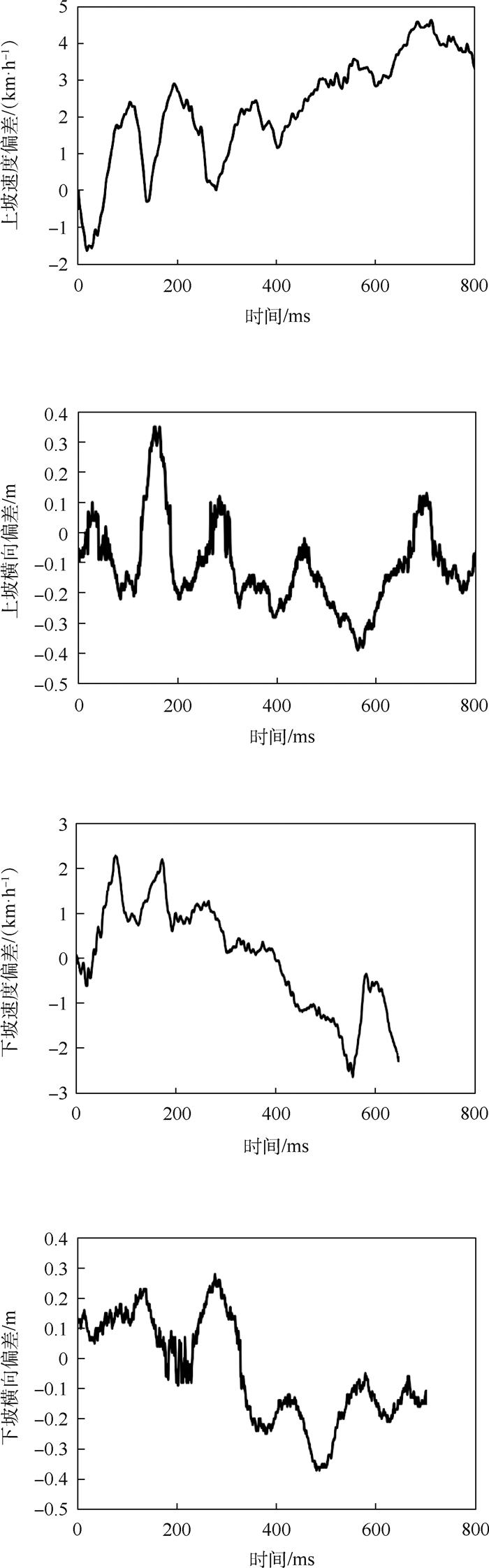
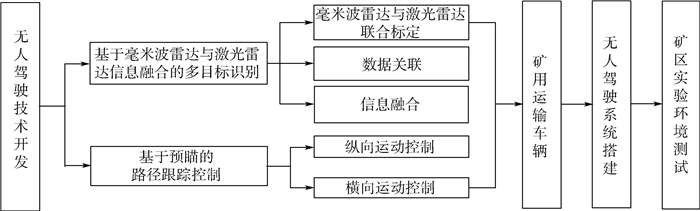
In order to solve the problems of low production efficiency and frequent safety accidents in mining areas, a driverless perception and control method for mining vehicles was proposed. In the part of perception, a multi-target recognition architecture based on the fusion of lidar and millimeter-wave radar was designed. On the basis of data association, the joint probabilistic data association (JPDA) algorithm based on Kalman filter was applied to realize multi-target recognition in mining environment. In the control part, the lateral control and longitudinal control were decoupled by the way of path preview tracking, and the deviation was corrected in real time through the feedback mechanism to realize the accurate lateral and longitudinal control of the driverless mining vehicle. In addition, the driverless system platform of real mine vehicle was built, and the above perception and control methods were tested in different scenarios in the mining area. The experimental results show that the perception algorithm realize the accurate detection of the drivable area of the mining road, and identify a variety of obstacle types. The control algorithm realize the accurate control of the longitudinal speed and lateral position of driverless mining vehicles in uphill and downhill scenarios, so as to meet the of practical applications.

| [1] |
田国强.人工智能技术在无人驾驶汽车领域的应用研究[J].江苏科技信息, 2017(14):56-57.
TIAN G Q.Research on the application of artificial intelligence technology in the field of driverless vehicles[J]. Jiangsu Science and Technology Information, 2017(14):56-57(in Chinese).
|
| [2] |
科技讯.小松无人驾驶矿用卡车彻底无人没有驾驶室[EB/OL]. (2016-09-28)[2018-01-13].
Science and technology news.The driverles mining truck of knomatsu is completely driverless with no cba[EB/OL]. (2016-09-28)[2018-01-13]. in Chinese).
|
| [3] |
郝永亮.中国非公路矿用汽车产业发展战略研究[D].呼和浩特: 内蒙古大学, 2013.
HAO Y L.Study on the development strategy of non-highway mining automobile industry in China[D]. Huhehot: Inner Mongolia University, 2013(in Chinese).
|
| [4] |
张宇航.无人驾驶汽车的起源、现状及展望[J].电子技术与软件工程, 2017(19):109-110.
ZHANG Y H.The origin, present situation and prospect of driverless cars[J]. Electronic Technology and Software Engineering, 2017(19):109-110(in Chinese).
|
| [5] |
马硕.无人驾驶汽车应用与发展现状分析[J].汽车与驾驶维修(维修版), 2017(4):142-143.
MA S.Analysis on the application and development of driverless vehicles[J]. Auto Driving & Service(Maintenance Version), 2017(4):142-143(in Chinese).
|
| [6] |
HILLEL A B, LERNER R, LEVI D, et al.Recent progress in road and lane detection:A survey[J]. Machine Vision and Applications, 2014, 25(3):727-745.
|
| [7] |
LI Q, CHEN L, LI M, et al.A sensor-fusion drivable-region and lane-detection system for autonomous vehicle navigation in challenging road scenarios[J]. IEEE Transactions on Vehicular Technology, 2014, 63(2):540-555.
|
| [8] |
GANDHI T, TRIVED M M.Pedestrian protection systems:Issues, survey, and challenges[J]. IEEE Transactions on Intelligent Transportation Systems, 2007, 8(3):413-430.
|
| [9] |
MATEI B C, TAN Y, SAWHNEY H S, et al.Rapid and scalable 3D object recognition using LIDAR data[C]//Conference on Automatic Target Recognition XVI.Bellingham: SPIE, 2006, 6234: 1.
|
| [10] |
DARMS M S, RYBSKI P E, BAKER C, et al.Obstacle detection and tracking for the urban challenge[J]. IEEE Transactions on Intelligent Transportation Systems, 2009, 10(3):475-485.
|
| [11] |
DARMS M, RYBSKI P, URMSON C.Classification and tracking of dynamic objects with multiple sensors for autonomous driving in urban environments[C]//IEEE Intelligent Vehicles Symposium, 2008: 1197-1202.
|
| [12] |
VU T D, BURLET J, AYCARD O.Grid-based localization and local mapping with moving object detection and tracking[J]. Information Fusion, 2014, 12(1):58-69.
|
| [13] |
JANAI J, GVNEY F, BEHL A, et al.Computer vision for autonomous vehicles: Problems, datasets and state-of-the-art[EB/OL]. (2017-04-18)[2019-01-13].
|
| [14] |
任殿波, 崔胜民, 吴杭哲.车道保持预瞄控制及其稳态误差分析[J].汽车工程, 2016, 38(2):192-199.
REN D B, CUI S M, WU H Z.Preview control for lane keeping and its steady-state error analysis[J]. Automotive Engineering, 2016, 38(2):192-199(in Chinese).
|
| [15] |
YANG K, MENENDEZ M, ZHENG N.Heterogeneity aware urban traffic control in a connected vehicle environment:A joint framework for congestion pricing and perimeter control[J]. Transportation Research Part C, 2019, 105:439-455.
|
| [16] |
张缓缓, 李庆望, 彭博, 等.紧急避障工况下的分布式驱动电动汽车稳定性控制[J].汽车技术, 2019(7):30-35.
ZHANG H H, LI Q W, PENG B, et al.Stability control of distributed driving electric vehicle under emergency obstacle avoidance[J]. Automobile Technology, 2019(7):30-35(in Chinese).
|
Figures(17)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@cq5520.com
Supported by:
Beijing Renhe Information Technology Co., Ltd.





 DownLoad:
DownLoad: