



All-weather airport runway foreign object debris detection based on mixed attention
-
摘要:
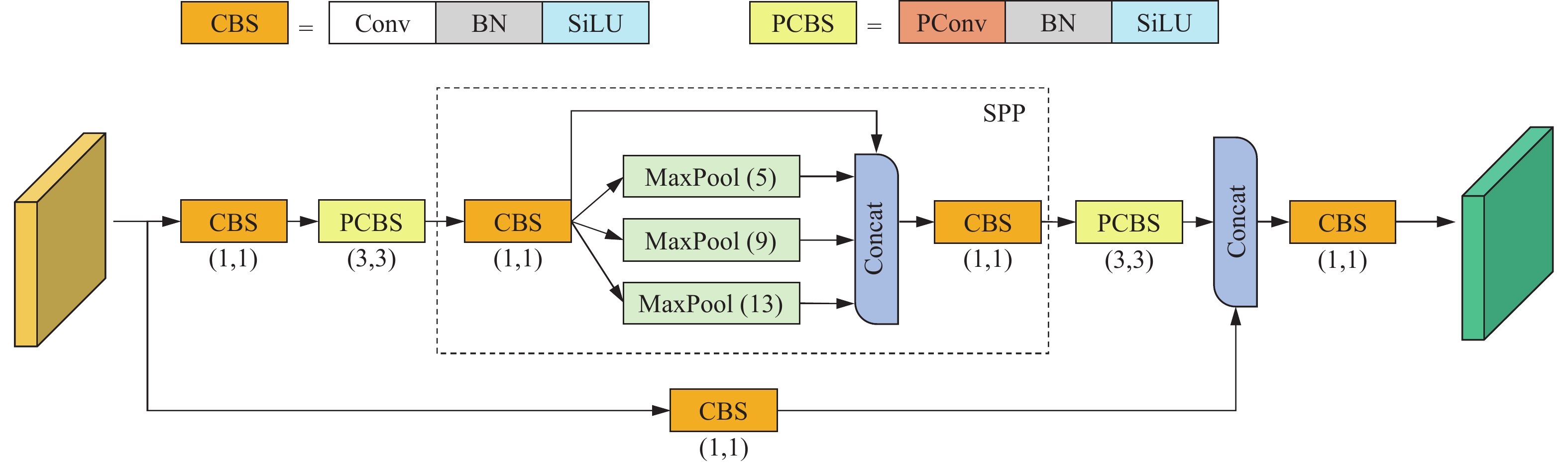
机场跑道的异物检测对于飞机安全起降起着至关重要的作用,然而不同光照、天气跑道环境下现有的检测算法存在漏检、误检等现象,为此提出了一种适用于全天候机场跑道环境的YOLOv5异物检测算法。针对原有网络中池化过程存在一定程度的特征损失问题,设计了跨阶段局部空间金字塔池化模块,可以自适应提取深层特征语义信息,增强网络多尺度表征能力;在特征融合部分引入混合注意力模块,利用通道和空间特征权值再分配,强化异物和无关背景要素的特征差异;针对小目标异物难以识别和定位从而导致漏检现象,设计了多尺度定位损失函数,通过加入相似性度量提高小目标的检测能力;使用优化后的训练策略训练MS-FOD数据集。实验结果表明:改进的算法达到了95.83%的均值平均精度和94.31%的召回率,相比原始的YOLOv5分别提高了3.68%和15.69%,同时检测速度为68帧/s,满足实时性异物检测的需求,有效验证了所提算法对机场跑道异物检测的有效性。
Abstract:The foreign object debris (FOD) detection of airport runway plays an important role in the safe take-off and landing of aircraft. However, the existing detection algorithms in different light and weather runway environments have the phenomenon of missed detection and false detection. Therefore, a YOLOv5 FOD detection algorithm suitable for all-weather airport runway environments is proposed. Firstly, aiming at the problem of feature loss in the pooling process of the original network, a cross stage partial spatial pyramid pooling module is designed, which can adaptively extract deep feature semantic information and enhance the multiscale representation ability of the network. Secondly, the mixed attention module is introduced in the feature fusion part, and the channel and spatial feature weights are redistributed to strengthen the feature differences between FOD and unrelated background elements. Then, a multiscale positioning loss function is designed to improve the detection ability of small targets by adding similarity measures, aiming at the phenomenon that small target FOD are difficult to identify and locate, which leads to missed detection. Finally, the optimized training strategy is used to train the MS-FOD dataset. The experimental results show that the improved algorithm achieves an average accuracy of 95.83%and a recall rate of 94.31%, which is 3.68 and 15.69 percentage points higher than the original YOLOv5, respectively. At the same time, the detection speed FPS is 68 frames per second, which meets the needs of real-time FOD detection. The effectiveness of the proposed algorithm for airport runway FOD detection is effectively verified.
-

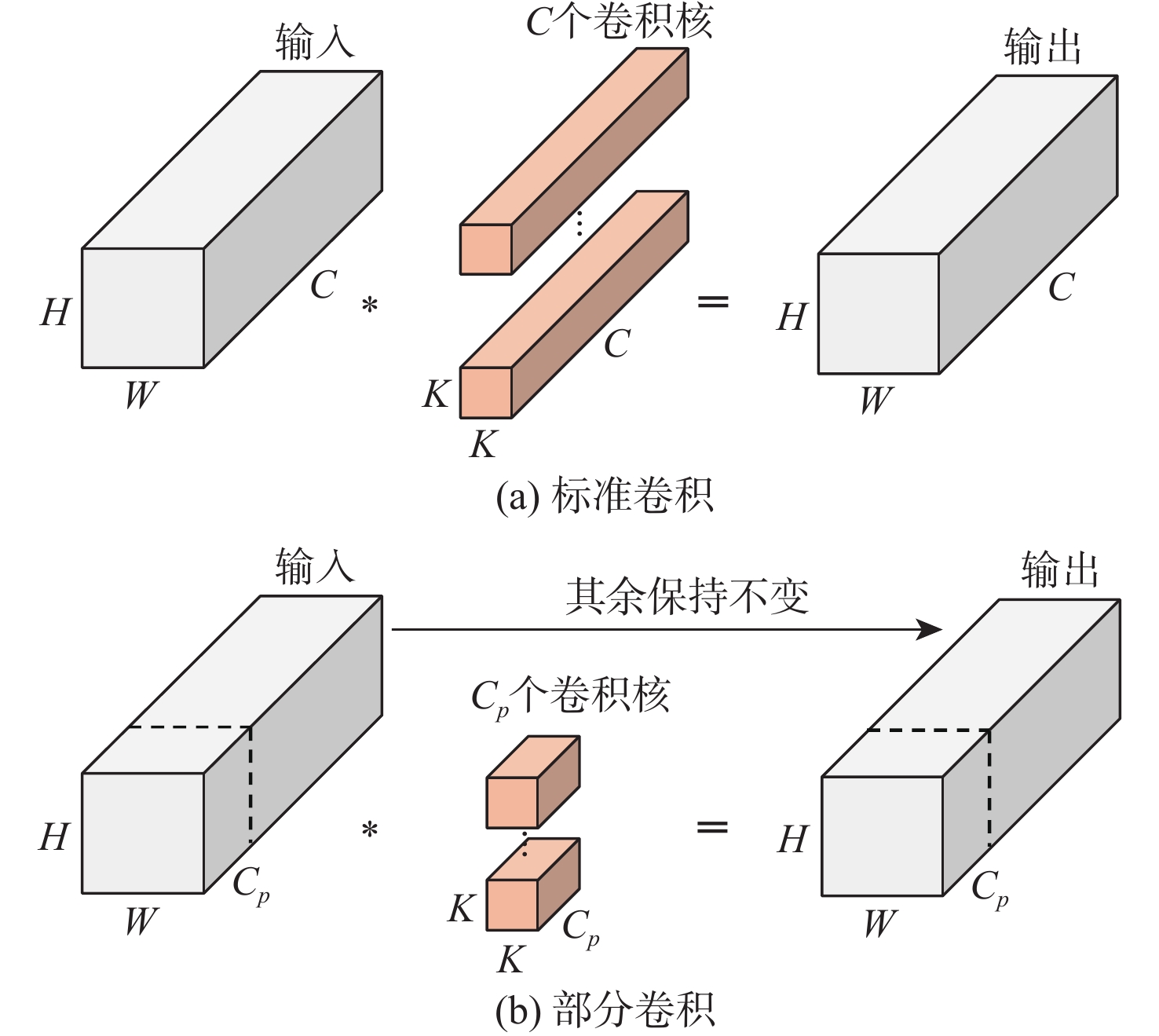
图 3 部分卷积和标准卷积的卷积过程
Figure 3. The convolutional process of partial convolution and convolution

图 8 训练过程中各算法mAP对比
Figure 8. The mAP comparison of each algorithm in the training process

图 9 改进前后多种场景下的效果对比
Figure 9. Comparison of effects in various environments before and after improvement
表 1 初始训练参数
Table 1. Initial training parameters
参数 数值 输入图片尺寸/像素 640×640 批处理大小 16 优化器 SGD 初始学习率 0.01 动量 0.937 权重衰减 0.000 5 训练轮数 300  下载: 导出CSV
下载: 导出CSV
表 2 聚类前后先验框尺寸
Table 2. Prior box size before and after clustering
检测层 默认先验框 聚类后的先验框 P3 (10,13), (16,30), (33,23) (11,11), (17,17), (26,14) P4 (30,61), (62,45), (59,119) (23,24), (37,35), (78,28) P5 (116,90), (156,198), (373,326) (31,74), (66,56), (92,95)
下载: 导出CSV
表 3 不同池化模块效果对比
Table 3. Effect comparison of different pooling modules
模型 空间金字塔池化模块 mAP/% 参数量 基线模型 SPP 92.15 7.2×106 模型1 SPPCSPC(Conv) 93.43(+1.28) 13.5×106 模型2 SPPCSPC(GConv,4groups) 92.88(+0.73) 8.2×106 模型3 SPPCSPC(DWConv) 93.62(+1.47) 9.3×106 模型4 P-SPPCSPC 93.87(+1.72) 9.1×106
下载: 导出CSV
表 4 不同损失函数效果对比
Table 4. Effect comparison of different loss functions
损失函数 P/% R/% mAP/% GIoU 95.66 78.62 92.15 DIoU 95.27 78.83 92.24(+0.09) CIoU 95.04 79.29 92.39(+0.24) NC-Loss(0.3) 94.53 81.69 92.21(+0.07) NC-Loss(0.5) 93.47 83.99 92.58(+0.43) NC-Loss(0.7) 93.30 88.83 93.57(+1.42) NWD 89.41 90.27 91.69(-0.46)
下载: 导出CSV
表 5 消融实验结果
Table 5. Ablation experimental results
模型 训练策略优化 P_SPPCSPC CBAM NC-Loss mAP/% mAPS/% mAPM/% mAPL/% 检测速度/(帧·s−1) 参数量 基线模型 92.15 85.78 90.59 95.52 80 7.2×106 G1 √ 92.81(+0.66) 87.39 92.35 95.89 80 7.2×106 G2 √ √ 94.34(+1.53) 91.42 94.77 96.18 75 9.2×106 G3 √ √ √ 94.93(+0.59) 92.56 95.51 96.58 68 9.3×106 G4 √ √ √ √ 95.83(+0.90) 94.44 95.98 96.46 68 9.3×106
下载: 导出CSV
表 6 不同算法模型的检测结果对比
Table 6. Comparison of detection results of different algorithm models
模型 主干网络 P/% R/% mAP/% 检测速速/(帧·s−1) 参数量/M Faster R-CNN ResNet50 69.67 91.90 83.54 11 136.9×106 SSD VGG-16 89.62 68.27 79.55 69 25.0×106 YOLOv3 Darknet53 91.28 79.12 88.64 36 61.6×106 YOLOv5s CSPDarknet53 95.66 78.62 92.15 80 7.2×106 YOLOv7 CBS+ELAN+MP+SPPCSPC 93.48 89.19 93.59 28 36.9×106 本文所提算法 CBS+C3+P-SPPCSPC 95.80 94.31 95.83 68 9.3×106
下载: 导出CSV
-
[1] FAA. Airport foreign object debris detection equipment: AC 150/5220-24[R]. Washington. D.C.: Federal Aviation Administration, 2009: 1-13. [2] 陈唯实, 李敬. 基于视频数据的机场跑道外来物检测[J]. 北京麻豆精品秘 国产传媒学报, 2014, 40(12): 1678-1684.CHEN W S, LI J. Foreign object debris detection for airport runway with video data[J]. Journal of Beijing University of Aeronautics and Astronautics, 2014, 40(12): 1678-1684(in Chinese). [3] WANG Y, HUANG H, WANG J, et al. An image denoising method for arc-scanning SAR for airport runway foreign object debris detection[J]. Electronics, 2023, 12(4): 984. doi: 10.3390/electronics12040984 [4] FUTATSUMORI S, SHIBAGAKI N. 96 GHz millimeter-wave radar system for airport surface detection purpose[C]//Proceedings of the 2022 IEEE Conference on Antenna Measurements and Applications. Piscataway: IEEE Press, 2022: 1-2. [5] REN S J, HAN S Y, WANG B S. Stationary and small target detection for millimeter-wave radar[C]//Proceedings of the 2022 IEEE 22nd International Conference on Communication Technology. Piscataway: IEEE Press, 2022: 1698-1702. [6] HAO X J, ZHAN Y H. Research on foreign object debris detection algorithm[C]//Proceedings of the 2022 International Conference on Mechanical and Electronics Engineering. Piscataway: IEEE Press, 2022: 312-318. [7] 王国屹, 孙永荣, 张怡, 等. 背景对齐差分的机场跑道异物分块检测与跟踪算法[J]. 计算机辅助设计与图形学学报, 2021, 33(3): 413-423.WANG G Y, SUN Y R, ZHANG Y, et al. Block detection and tracking algorithm of foreign objects debris in airport runway based on background alignment and difference[J]. Journal of Computer-Aided Design & Computer Graphics, 2021, 33(3): 413-423(in Chinese). [8] ADI K, WIDODO C E, WIDODO A P, et al. Detection of foreign object debris (Fod) using convolutional neural network (CNN)[J]. Journal of Theoretical and Applied Information Technology, 2022, 100(1): 184-191. [9] 李沙, 李春娟. 机场跑道异物检测系统设计与算法研究[J]. 现代雷达, 2021, 43(6): 80-85.LI S, LI C J. A study on design and algorithm of FOD detection and surveillance system for airport runway[J]. Modern Radar, 2021, 43(6): 80-85(in Chinese). [10] CAO X G, GONG G P, LIU M M, et al. Foreign object debris detection on airfield pavement using region based convolution neural network[C]//Proceedings of the 2016 International Conference on Digital Image Computing: Techniques and Applications. Piscataway: IEEE Press, 2016: 1-6. [11] 于晨. 基于深度学习的机场跑道异物检测与识别技术研究[D]. 北京: 北京工业大学, 2019: 39-52.YU C. Research of deep learning based airport runway foreign object debris detection and recognition[D]. Beijing: Beijing University of Technology, 2019: 39-52(in Chinese). [12] REN S Q, HE K M, GIRSHICK R, et al. Faster R-CNN: towards real-time object detection with region proposal networks[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39(6): 1137-1149. doi: 10.1109/TPAMI.2016.2577031 [13] 郭晓静, 隋昊达. 改进YOLOv3在机场跑道异物目标检测中的应用[J]. 计算机工程与应用, 2021, 57(8): 249-255. doi: 10.3778/j.issn.1002-8331.2007-0173GUO X J, SUI H D. Application of improved YOLOv3 in foreign object debris target detection on airfield pavement[J]. Computer Engineering and Applications, 2021, 57(8): 249-255(in Chinese). doi: 10.3778/j.issn.1002-8331.2007-0173 [14] FARHADI A, REDMON J. Yolov3: an incremental improvement[C]//Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2018, 1804: 1-6. [15] 何自芬, 陈光晨, 王森, 等. 融合自注意力特征嵌入的夜间机场跑道异物入侵检测[J]. 光学精密工程, 2022, 30(13): 1591-1605. doi: 10.37188/OPE.20223013.1591HE Z F, CHEN G C, WANG S, et al. Detection of foreign object debris on night airport runway fusion with self-attentional feature embedding[J]. Optics and Precision Engineering, 2022, 30(13): 1591-1605(in Chinese). doi: 10.37188/OPE.20223013.1591 [16] WU W T, LIU H, LI L L, et al. Application of local fully convolutional neural network combined with YOLO v5 algorithm in small target detection of remote sensing image[J]. PLoS One, 2021, 16(10): e0259283. doi: 10.1371/journal.pone.0259283 [17] WANG C Y, MARK LIAO H Y, WU Y H, et al. CSPNet: a new backbone that can enhance learning capability of CNN[C]//Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops. Piscataway: IEEE Press, 2020: 1571-1580. [18] VALLENDER S S. Calculation of the Wasserstein distance between probability distributions on the line[J]. Theory of Probability & Its Applications, 1974, 18(4): 784-786. [19] CHEN J R, KAO S H, HE H, et al. Run, don't walk: chasing higher FLOPS for faster neural networks[C]//Proceedings of the 2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2023: 12021-12031. [20] WOO S, PARK J, LEE J Y, et al. CBAM: convolutional block attention module[C]//Proceedings of the Computer Vision – ECCV 2018. Berlin: Springer International Publishing, 2018: 3-19. [21] WANG J W, XU C, YANG W, et al. A normalized Gaussian Wasserstein distance for tiny object detection[EB/OL]. (2021-10-26)[2023-07-05]. http://doi.org/10.485501/arXiv.2110.13389. [22] ZHENG Z H, WANG P, LIU W, et al. Distance-IoU loss: faster and better learning for bounding box regression[J]. Proceedings of the AAAI Conference on Artificial Intelligence, 2020, 34(7): 12993-13000. doi: 10.1609/aaai.v34i07.6999 [23] 杨勇, 邱根莹, 黄淑英, 等. 基于改进大气散射模型的单幅图像去雾方法[J]. 北京麻豆精品秘 国产传媒学报, 2022, 48(8): 1364-1375.YANG Y, QIU G Y, HUANG S Y, et al. Single image dehazing method based on improved atmospheric scattering model[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(8): 1364-1375(in Chinese). [24] LIU W, ANGUELOV D, ERHAN D, et al. SSD: single shot MultiBox detector[C]//Proceedings of the Computer Vision – ECCV 2016. Berlin: Springer, 2016: 21-37. [25] WANG C Y, BOCHKOVSKIY A, LIAO H Y M. YOLOv7: trainable bag-of-freebies sets new state-of-the-art for real-time object detectors[C]//Proceedings of the 2023IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE Press, 2023: 7464-7475. -

 下载:
下载:







 点击查看大图
点击查看大图

计量
- 文章访问数: 261
- HTML全文浏览量: 77
- PDF下载量: 25
- 被引次数: 0
