



Trajectory optimization of high-altitude balloon in nearspace-ground collaborative observation
-
摘要:
高空气球与地基平台组网开展协同观测的需求日益迫切,覆盖一致性是其关键问题之一,面临网络拓扑时变、气球调控能力受限、临近空间风场复杂等多重挑战。为改善高空气球与地基站网协同观测的覆盖一致性,以带有副气囊且不配备动力装置的高空气球为研究对象,从垂直方向和水平方向两方面分析高空气球轨迹调控方法,研究高空气球对地观测覆盖区域,针对高空气球位置时变的特征,设计了临地协同观测覆盖一致性评价指标,提出基于鲸鱼算法的高空气球组网轨迹优化方法,并针对多种输入条件对该方法进行了仿真验证。仿真结果表明:所提方法能够大幅改善临地协同观测的覆盖一致性,尤以夏秋季准零风层存在的情况下改善效果更为明显。
Abstract:The requirement of collaborative observation by high-altitude balloon network and ground-based network is increasingly urgent. And coverage consistency is one of its critical problems affecting observation performance, which faces many challenges such as time-varying network topology, limited balloon control ability, and complicated wind field in near space. To improve the coverage consistency of high-altitude balloon network and ground-based network in cooperative observation, high-altitude balloon with secondary airbag but without propulsion device is studied, its trajectory control approach is analyzed from both the vertical direction and the horizontal direction, and its coverage in earth observation is discussed. Considering the time-variant position of high-altitude balloons, a performance index is designed to evaluate the coverage consistency, and a trajectory optimization algorithm for high-altitude balloon is proposed based on whale optimization algorithm. Simulations are carried out under many inputs. And simulation results show that the proposed algorithm can improve the coverage consistency significantly, especially in summer and autumn wind fields with quasi-zero wind layer.
-

图 3 高空气球对地覆盖区域示意图
Figure 3. Schematic diagram of high-altitude balloon coverage area on ground

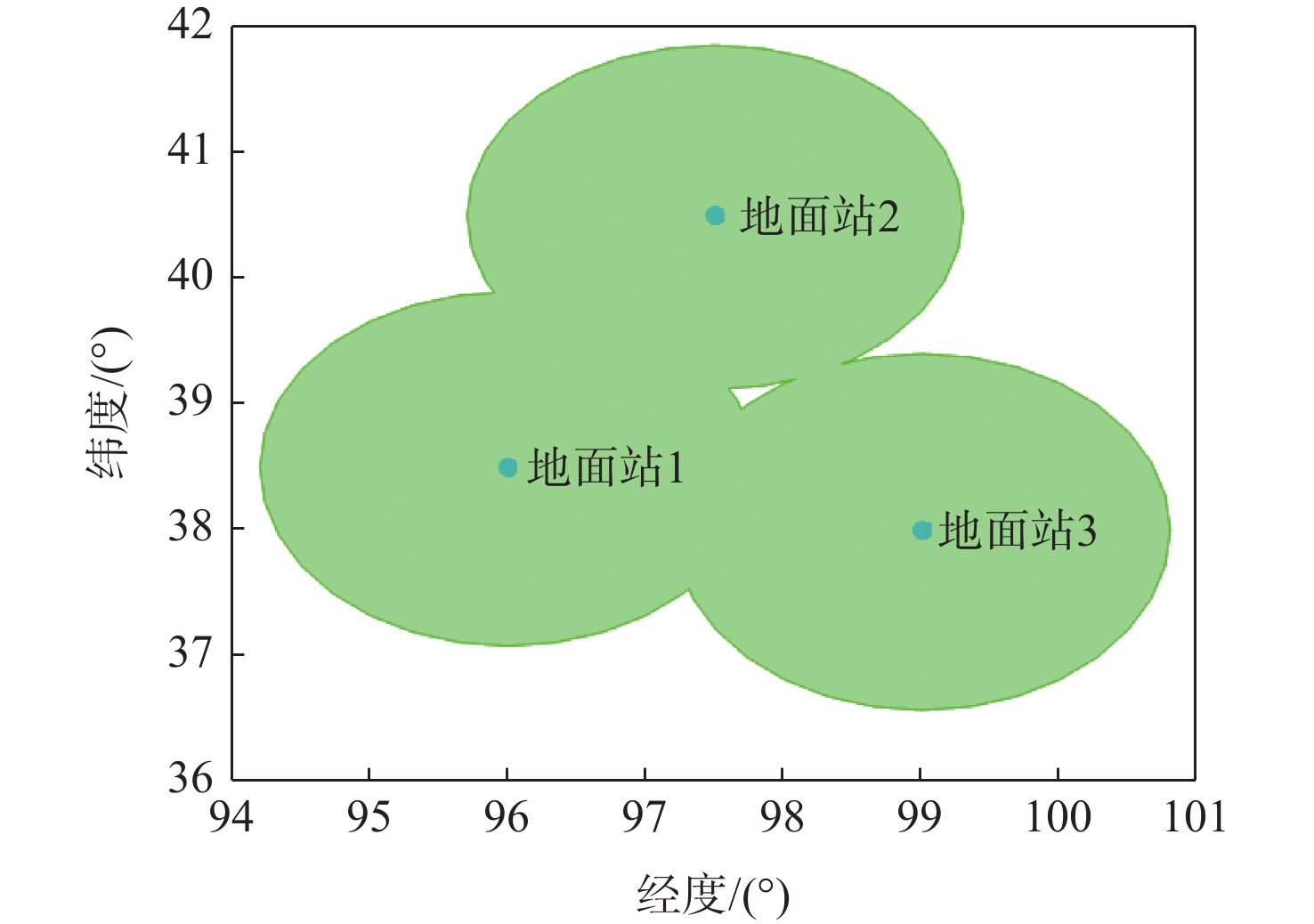
图 5 t时刻临基网络覆盖区域S(t)示例
Figure 5. Example of coverage area S(t) of nearspace base network at time t

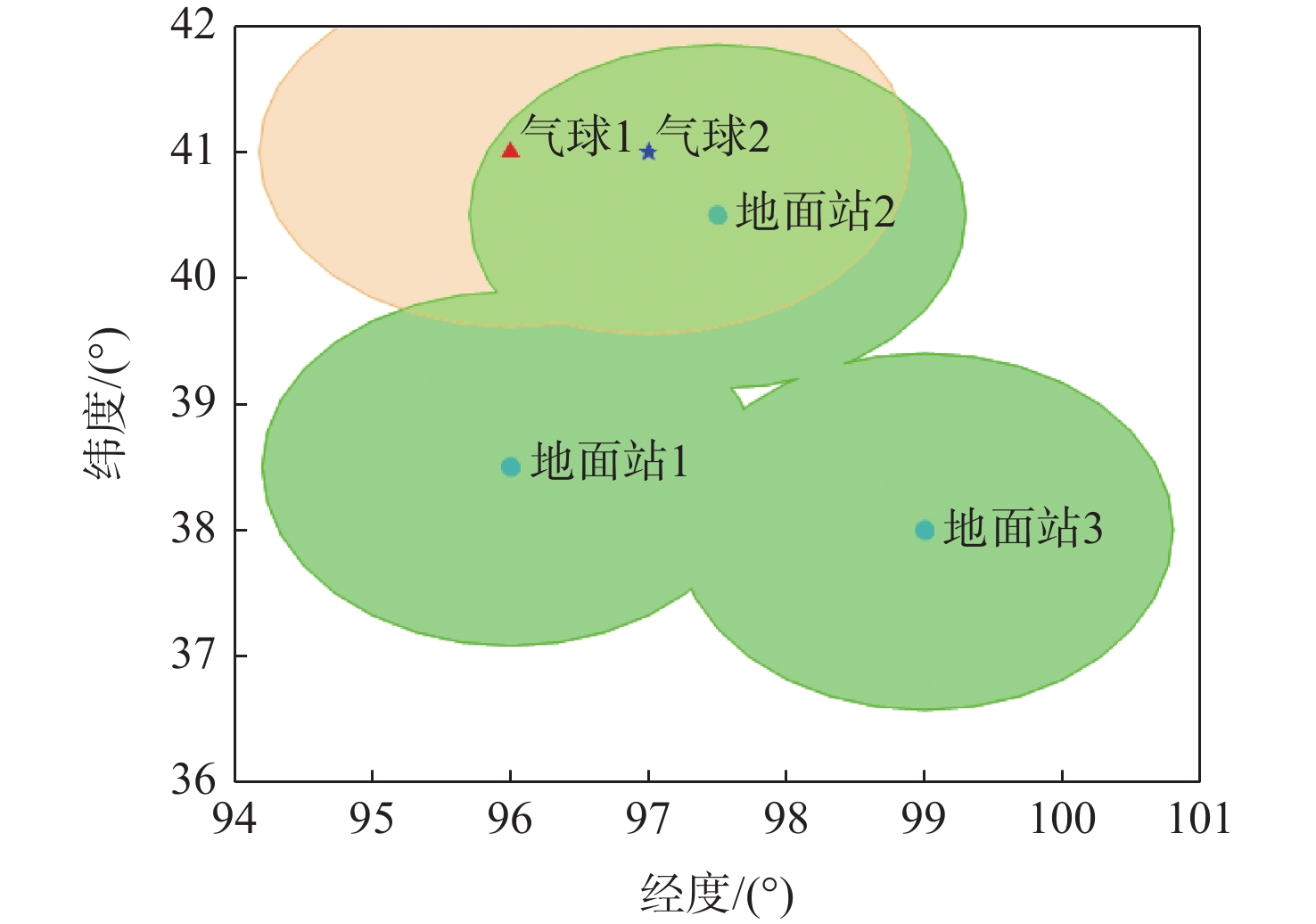
图 6 地基网络覆盖区域与t时刻临基网络覆盖区域的交集M∩S(t)示例
Figure 6. Example of intersection M∩S (t) between coverage area of ground based network and coverage area of nearspace based network at time t
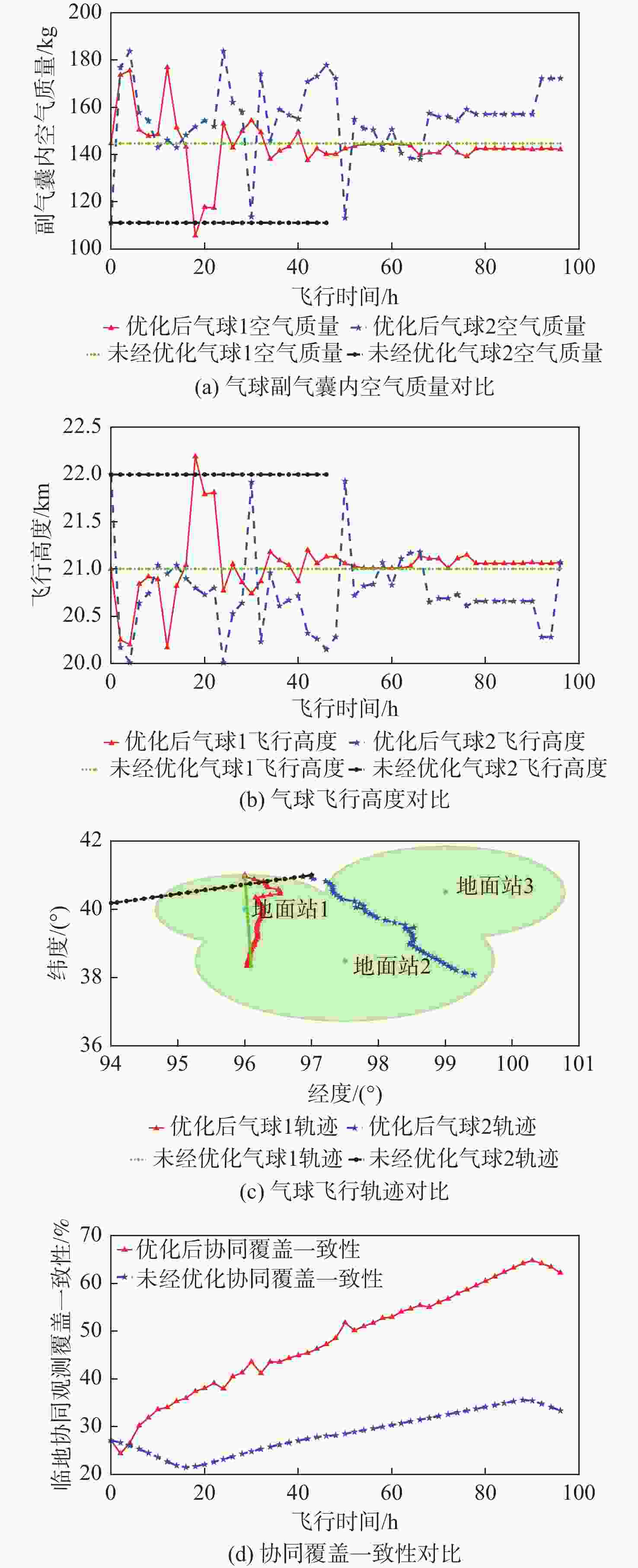
图 8 轨迹优化与无轨迹优化的仿真结果对比
Figure 8. Comparison of optimized results and unoptimized results
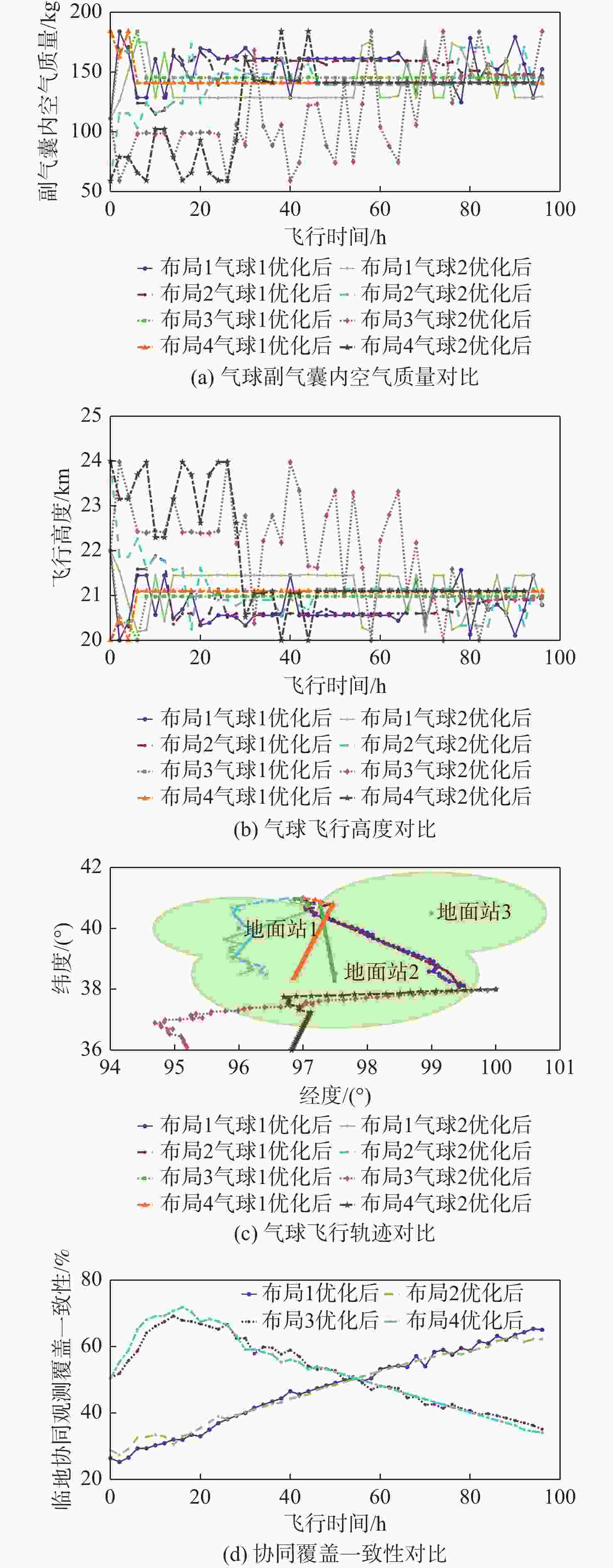
图 9 不同初始布局的优化结果对比
Figure 9. Comparison of optimization results for different initial layouts
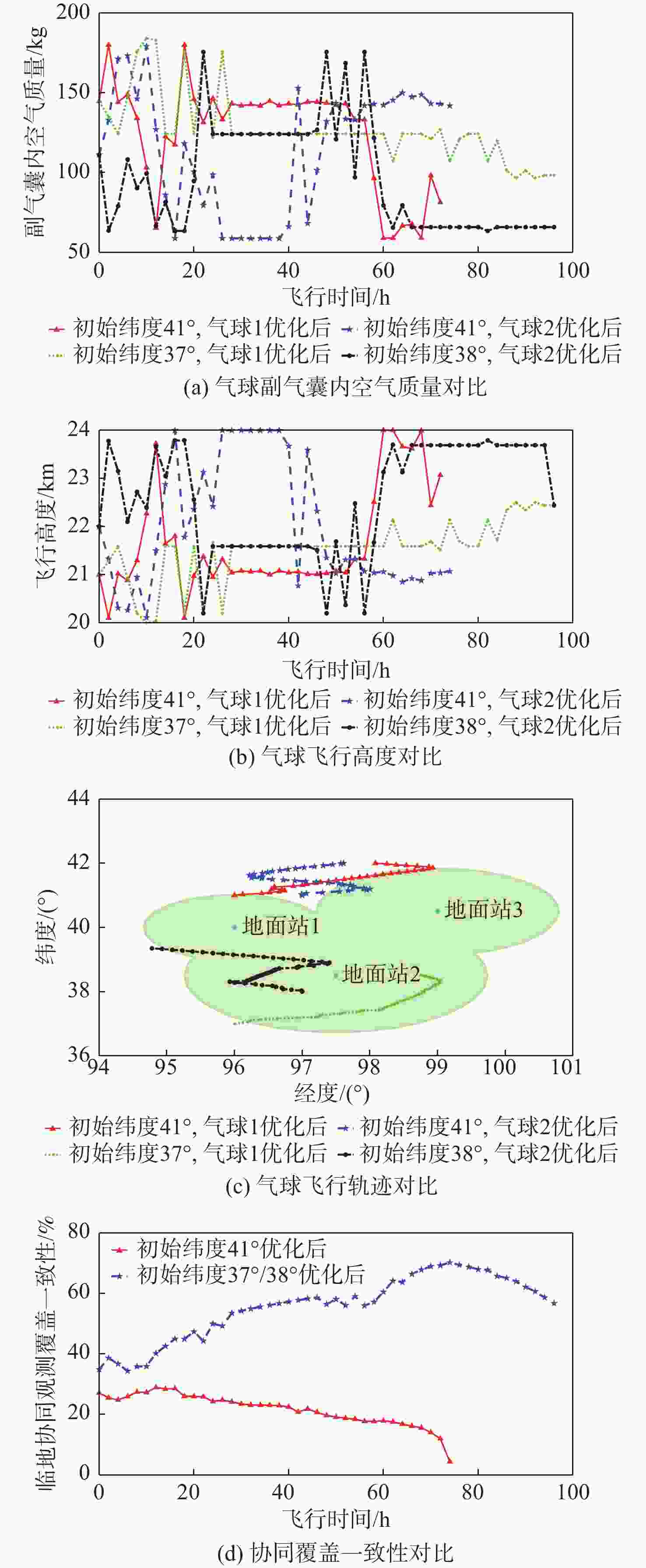
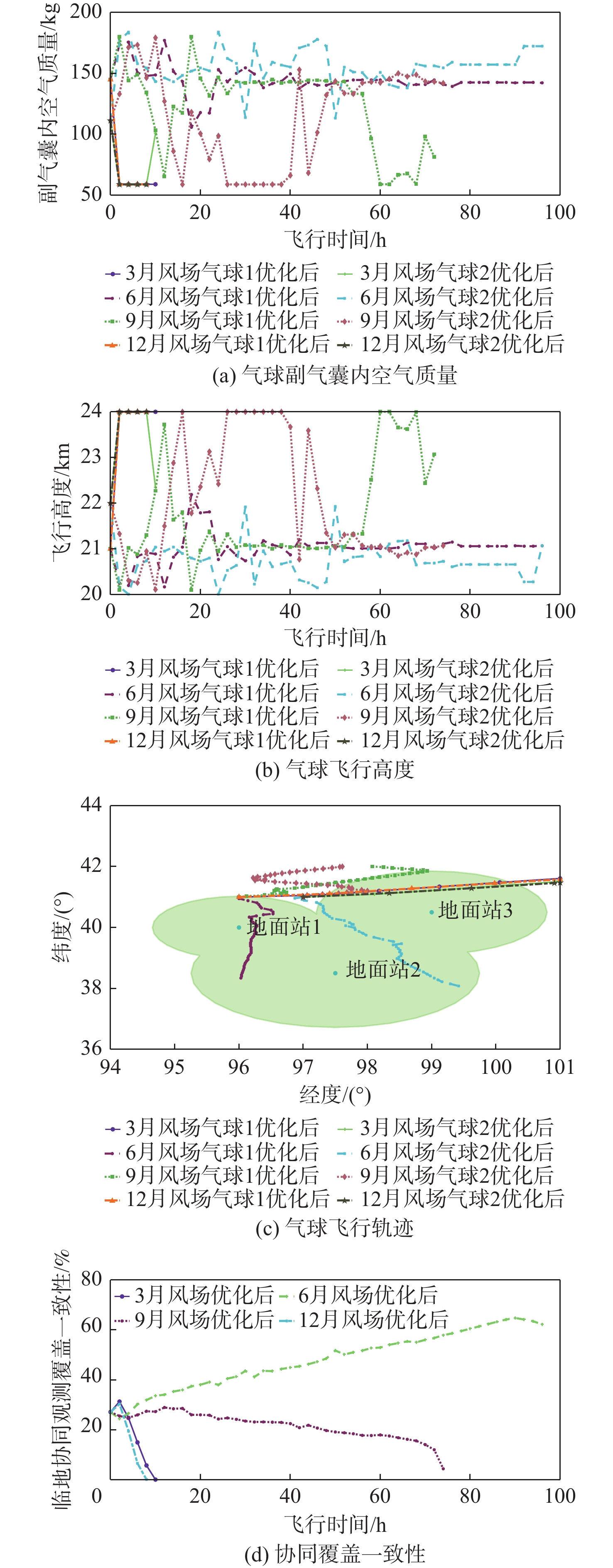
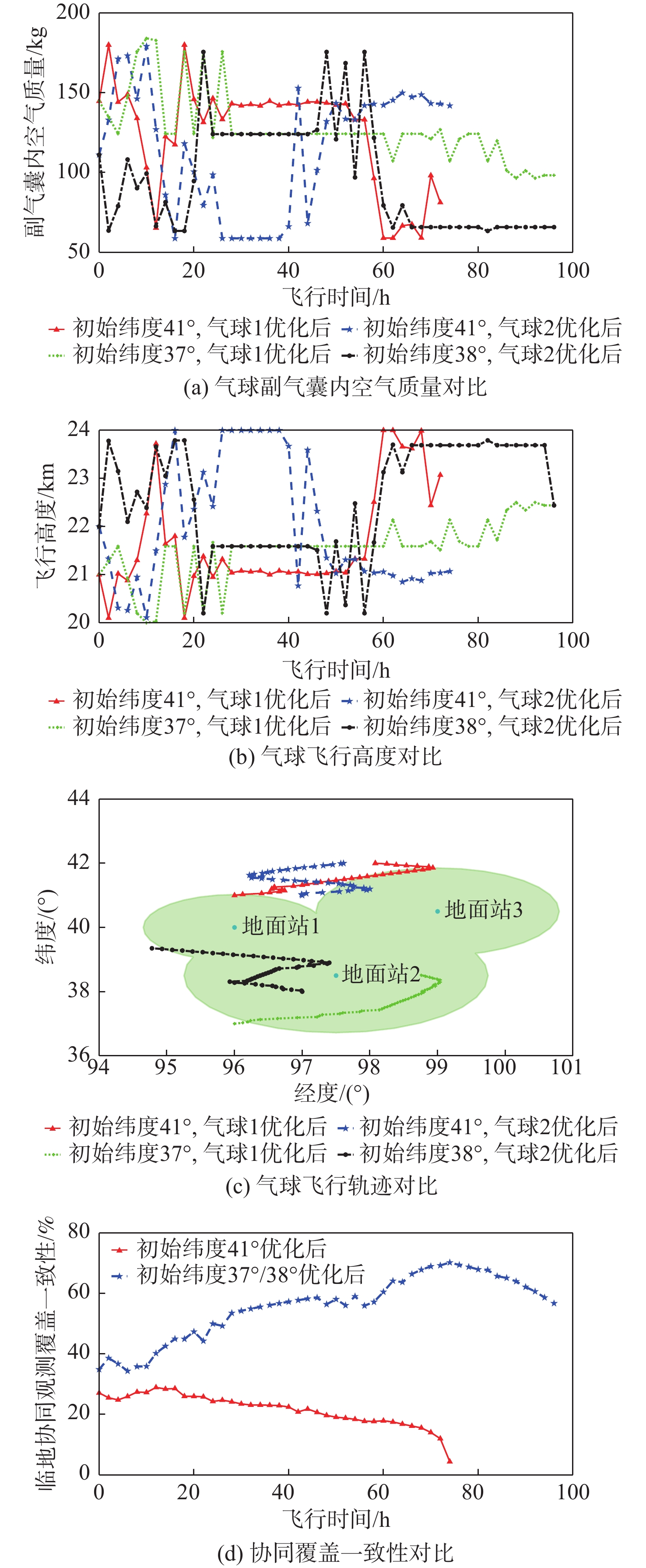
图 11 9月风场下不同初始水平布局的轨迹优化对比
Figure 11. Comparison of trajectory optimization with different initial horizontal layouts in wind fields of September
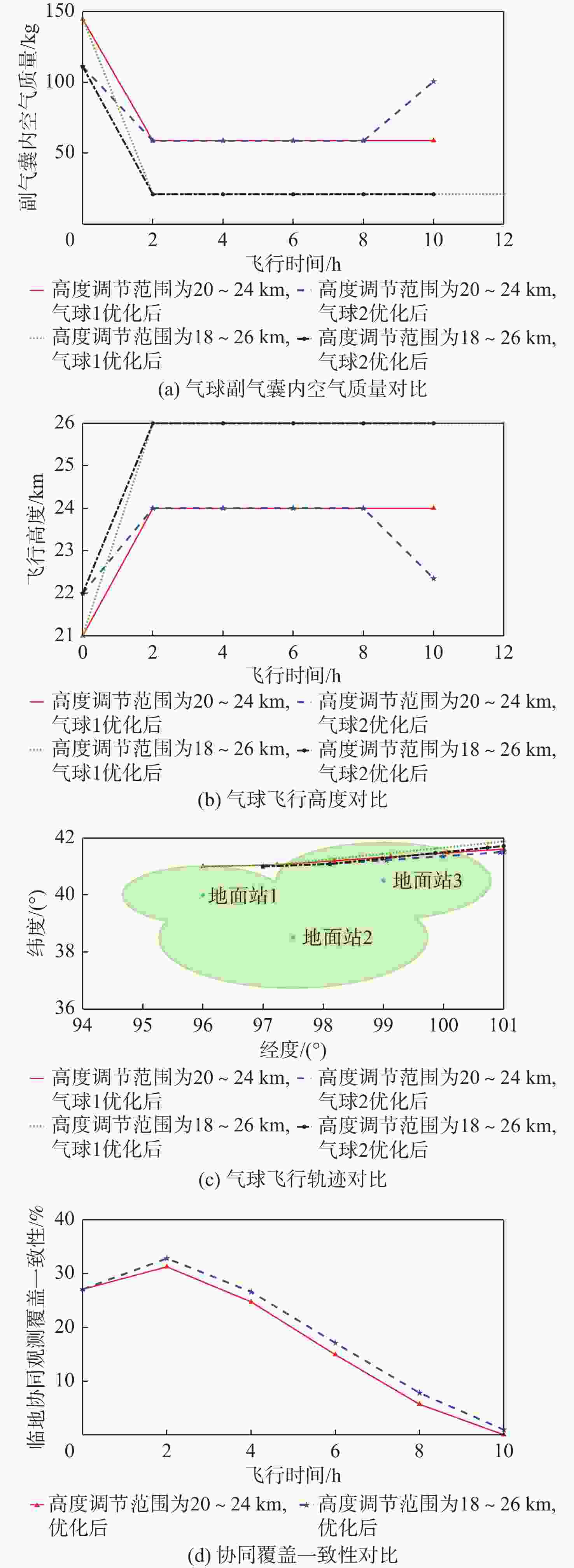
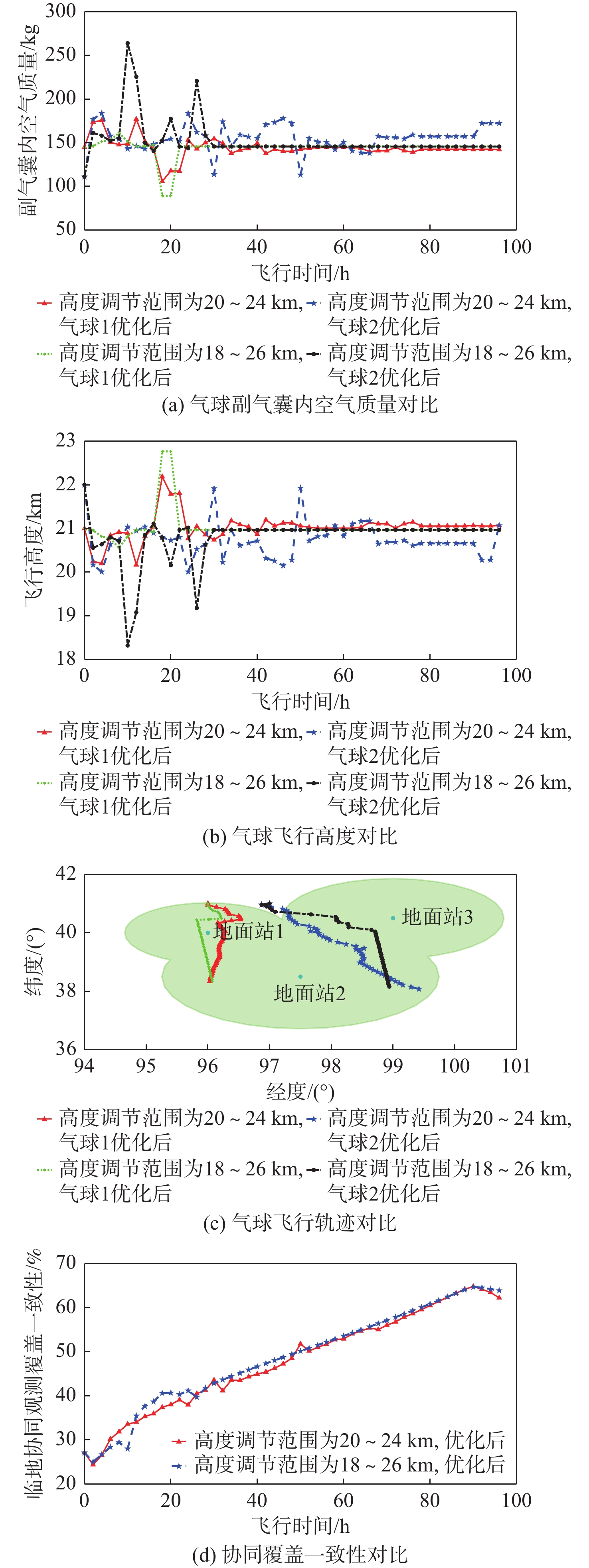
图 12 不同高度调节能力的仿真结果对比(3月风场)
Figure 12. Comparison of simulation results for different height adjustment capabilities (March wind field)

图 13 不同高度调节能力的仿真结果对比(6月风场)
Figure 13. Comparison of simulation results for different height adjustment capabilities (June wind field)

图 14 不同高度调节能力的仿真结果对比(9月风场)
Figure 14. Comparison of simulation results for different height adjustment capabilities (September wind field)

图 15 不同高度调节能力的仿真结果对比(12月风场)
Figure 15. Comparison of simulation results for different height adjustment capabilities (December wind field)
表 1 地基站网仿真参数
Table 1. Simulation parameters of ground-based platforms
地基测站 经度/(°) 纬度/(°) 观测覆盖半径/km 地基测站1 96.0 38.5 200 地基测站2 97.5 40.0 200 地基测站3 99.0 38.0 200  下载: 导出CSV
下载: 导出CSV
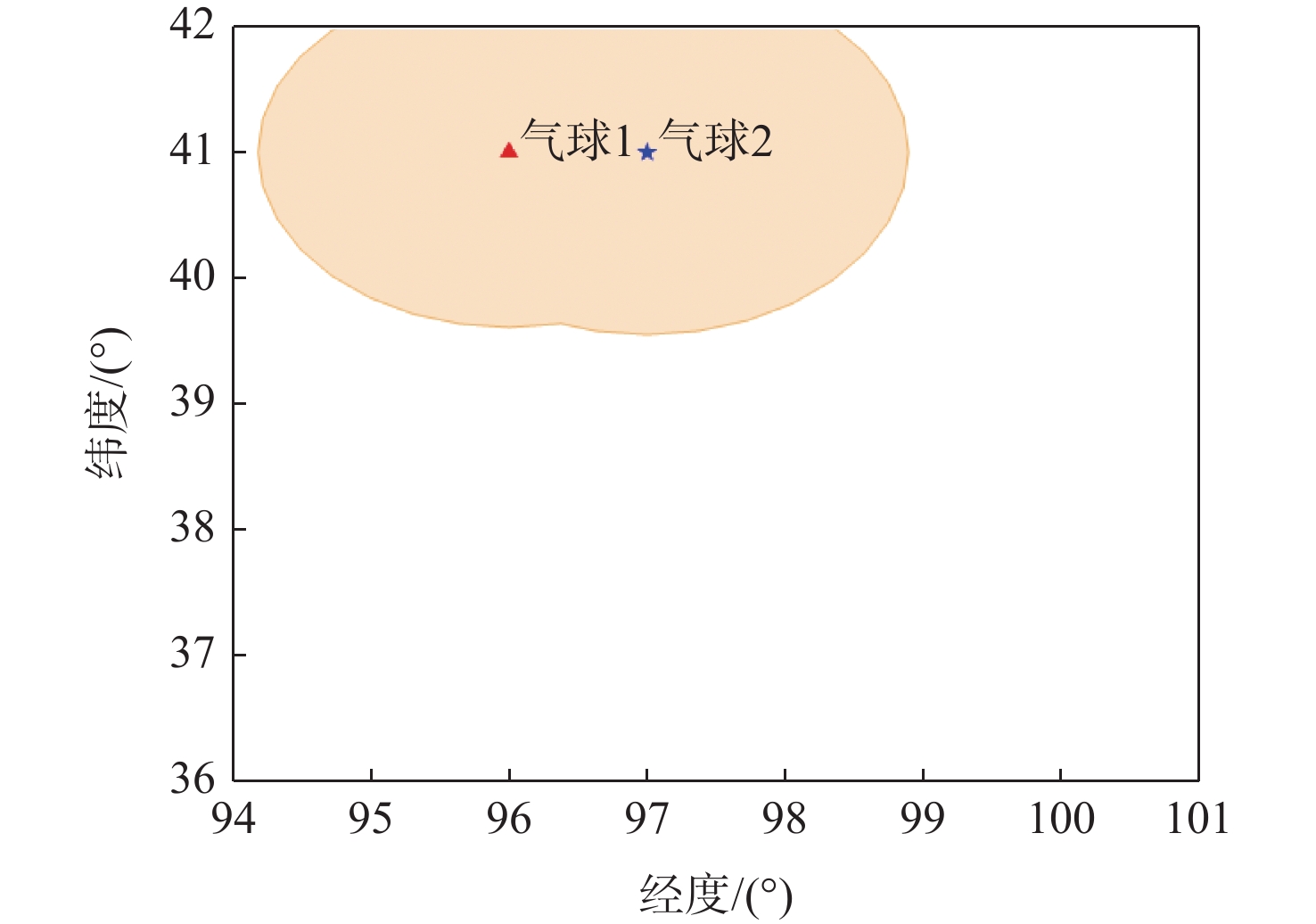
表 2 高空气球仿真参数
Table 2. Simulation parameters of high-altitude balloons
气球 初始经度/(°) 初始纬度/(°) 初始飞行
高度/km最低飞行
高度/km最高飞行
高度/km副气囊内初始
空气质量/kg阀门开口
半径/m单位时间
进气量/ (m3·s−1)高空气球1 96 41 21 20 24 144.7 0.15 0.3 高空气球2 97 41 22 20 24 111.1 0.15 0.3
下载: 导出CSV
表 3 轨迹优化结果与无轨迹优化结果对比
Table 3. Performance comparison between optimized results and unoptimized results
结果类型 临地协同观测覆盖一致性/% 轨迹优化结果 24.45 无轨迹优化结果 14.61
下载: 导出CSV
表 4 高空气球初始网络布局
Table 4. Initial network layout of high-altitude balloons
布局 气球1
初始
经度/(°)气球1
初始
纬度/(°)气球1
初始
高度/km气球2
初始
经度/(°)气球2
初始
纬度/(°)气球2
初始
高度/km布局1 97 41 22 97 41 22 布局2 97 41 20 97 41 24 布局3 97 41 22 100 38 22 布局4 97 41 20 100 38 24
下载: 导出CSV
表 5 高空气球初始网络布局对协同观测性能的影响对比
Table 5. Comparison of influence of initial network layout of high-altitude balloons on collaborative observation performance
布局 轨迹优化后的临地协同
观测覆盖一致性/%无轨迹优化的临地协同
观测覆盖一致性/%布局1 23.95 4.00 布局2 23.97 4.97 布局3 26.64 13.09 布局4 26.83 12.26
下载: 导出CSV
表 6 不同风场的轨迹优化结果对比
Table 6. Comparison of trajectory optimization results for different wind fields
风场 轨迹优化后的临地协同
观测覆盖一致性/%无轨迹优化的临地协同
观测覆盖一致性/%3月 1.08 0.88 6月 24.45 14.61 9月 8.56 7.48 12月 0.87 0.77
下载: 导出CSV
表 7 不同高度调控能力的轨迹优化结果对比
Table 7. Comparison of trajectory optimization results with different height control capabilities
风场 气球高度调控范围为20~
24 km的临地协同
观测覆盖一致性/%气球高度调控范围为18~
26 km的临地协同
观测覆盖一致性/%3月 1.08 1.17 6月 24.45 24.77 9月 8.56 10.04 12月 0.87 0.91
下载: 导出CSV
-
[1] 顾逸东. 气球科学观测100年[J]. 现代物理知识, 2020, 32(2): 3-12.GU Y D. 100 years of scientific balloon observations[J]. Modern Physics, 2020, 32(2): 3-12(in Chinese). [2] FESEN R, BROWN Y. A method for establishing a long duration, stratospheric platform for astronomical research[J]. Experimental Astronomy, 2015, 39(3): 475-493. doi: 10.1007/s10686-015-9459-9 [3] VOSS P B, HOLE L R, HELBLING E F, et al. Continuous in situ soundings in the Arctic boundary layer: a new atmospheric measurement technique using controlled meteorological balloons[J]. Journal of Intelligent & Robotic Systems, 2013, 70(1): 609-617. [4] KREMIC T, CHENG A F, HIBBITTS K, et al. Stratospheric balloons for planetary science and the balloon observation platform for planetary science (BOPPS) mission summary[C]//Proceedings of the IEEE Aerospace Conference. Piscataway: IEEE Press, 2015: 1-10. [5] CARRENO-LUENGO H, CAMPS A, QUEROL J, et al. First results of a GNSS-R experiment from a stratospheric balloon over boreal forests[J]. IEEE Transactions on Geoscience and Remote Sensing, 2016, 54(5): 2652-2663. doi: 10.1109/TGRS.2015.2504242 [6] 宋平. 基于卫星、火箭和气球探测资料的我国临近空间大气环境特征分析[D]. 长沙: 国防科技大学, 2020: 4-7.SONG P. Analysis of atmospheric environment characteristics in China’s near space based on satellite, rocket and balloon detection data[D]. Changsha: National University of Defense Technology, 2020: 4-7(in Chinese). [7] 荆楠, 李创, 潘越, 等. 临近空间高空气球地基探测能力分析[J]. 光子学报, 2016, 45(1): 104002.JING N, LI C, PAN Y, et al. Analysis of ground-based detection ability of high altitude balloon in near space[J]. Acta Photonica Sinica, 2016, 45(1): 104002(in Chinese). [8] 王喆, 王振会, 曹晓钟. 毫米波雷达与无线电探空对云垂直结构探测的一致性分析[J]. 气象学报, 2016, 74(5): 815-826.WANG Z, WANG Z H, CAO X Z. Consistency analysis for cloud vertical structure derived from millimeter cloud radar and radiosonde profiles[J]. Acta Meteorologica Sinica, 2016, 74(5): 815-826(in Chinese). [9] 韩彦霞, 王成刚, 严家德, 等. 新型边界层气象探空系统的开发与应用[J]. 气象科技, 2017, 45(5): 804-810.HAN Y X, WANG C G, YAN J D, et al. Development and application of new boundary layer meteorological sounding system[J]. Meteorological Science and Technology, 2017, 45(5): 804-810(in Chinese). [10] BELLEMARE M G, CANDIDO S, CASTRO P S, et al. Autonomous navigation of stratospheric balloons using reinforcement learning[J]. Nature, 2020, 588(7836): 77-82. doi: 10.1038/s41586-020-2939-8 [11] RAMESH S S, MA J L, LIM K M, et al. Numerical evaluation of station-keeping strategies for stratospheric balloons[J]. Aerospace Science and Technology, 2018, 80: 288-300. doi: 10.1016/j.ast.2018.07.010 [12] JIANG Y, LV M Y, LI J. Station-keeping control design of double balloon system based on horizontal region constraints[J]. Aerospace Science and Technology, 2020, 100: 105792. doi: 10.1016/j.ast.2020.105792 [13] 王益平, 周飞, 徐明. 临近空间浮空器区域驻留控制策略研究[J]. 中国空间科学技术, 2018, 38(1): 63-69.WANG Y P, ZHOU F, XU M. Research on control strategy of territory-hovering aerostat in near space[J]. Chinese Space Science and Technology, 2018, 38(1): 63-69(in Chinese). [14] 邓小龙, 李魁, 于春锐, 等. 准零风层新型临近空间浮空器区域驻留性能[J]. 国防科技大学学报, 2019, 41(1): 5-12.DENG X L, LI K, YU C R, et al. Station-keeping performance of novel near-space aerostat in quasi-zero wind layer[J]. Journal of National University of Defense Technology, 2019, 41(1): 5-12(in Chinese). [15] 柏方超, 杨希祥, 邓小龙, 等. 基于深度强化学习的风场中浮空器驻留控制[J]. 北京麻豆精品秘 国产传媒学报, 2024, 50(7): 2354-2366.BAI F C, YANG X X, DENG X L, et al. Station keeping control for aerostat in wind fields based on deep reinforcement learning[J]. Journal of Beijing University of Aeronautics and Astronautics, 2024, 50(7): 2354-2366(in Chinese). [16] 李魁, 邓小龙, 杨希祥, 等. 基于平流层风场预测的浮空器轨迹控制[J]. 北京麻豆精品秘 国产传媒学报, 2019, 45(5): 1008-1018.LI K, DENG X L, YANG X X, et al. Trajectory control of aerostat based on prediction of stratospheric wind field[J]. Journal of Beijing University of Aeronautics and Astronautics, 2019, 45(5): 1008-1018 (in Chinese). [17] 林康, 马云鹏, 郑泽伟, 等. 基于副气囊的平流层浮空器高度控制[J]. 北京麻豆精品秘 国产传媒学报, 2022, 48(5): 762-770.LIN K, MA Y P, ZHENG Z W, et al. Height control of stratospheric aerostat based on secondary airbag[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(5): 762-770(in Chinese). [18] 龙远, 邓小龙, 杨希祥, 等. 极涡风场中平流层浮空器轨迹仿真研究[J]. 计算机仿真, 2021, 38(8): 37-42.LONG Y, DENG X L, YANG X X, et al. Trajectory simulation of stratosphere aerostats in polar vortex wind field[J]. Computer Simulation, 2021, 38(8): 37-42(in Chinese). [19] 邓小龙, 丛伟轩, 李魁, 等. 风场综合利用的新型平流层浮空器轨迹设计[J]. 宇航学报, 2019, 40(7): 748-757.DENG X L, CONG W X, LI K, et al. Trajectory design of a novel stratospheric aerostat based on comprehensive utilization of wind fields[J]. Journal of Astronautics, 2019, 40(7): 748-757(in Chinese). [20] MUELLER J B, ZHAO Y J, GARRARD W L. Optimal ascent trajectories for stratospheric airships using wind energy[J]. Journal of Guidance, Control, and Dynamics, 2009, 32(4): 1232-1245. doi: 10.2514/1.41270 [21] 常晓飞, 白云飞, 符文星, 等. 基于平流层特殊风场的浮空器定点方案研究[J]. 西北工业大学学报, 2014, 32(1): 12-17.CHANG X F, BAI Y F, FU W X, et al. Research on fixed-point aerostat based on its special stratosphere wind field[J]. Journal of Northwestern Polytechnical University, 2014, 32(1): 12-17(in Chinese). [22] 陶梦初, 何金海, 刘毅. 平流层准零风层统计特征及准两年周期振荡对其影响分析[J]. 气候与环境研究, 2012, 17(1): 92-102.TAO M C, HE J H, LIU Y. Analysis of the characteristics of the stratospheric quasi-zero wind layer and the effects of the quasi-biennial oscillation on it[J]. Climatic and Environmental Research, 2012, 17(1): 92-102(in Chinese). [23] 胡耀月, 王东海, 吴珍珍, 等. 中国区域临近空间准零风层的观测特征[J]. 空间科学学报, 2022, 42(3): 383-395.HU Y Y, WANG D H, WU Z Z, et al. Analysis of the observational characteristics of the quasi-zero wind layer in the near space over China[J]. Chinese Journal of Space Science, 2022, 42(3): 383-395(in Chinese). [24] MIRJALILI S, LEWIS A. The whale optimization algorithm[J]. Advances in Engineering Software, 2016, 95: 51-67. doi: 10.1016/j.advengsoft.2016.01.008 [25] MAFARJA M M, MIRJALILI S. Hybrid whale optimization algorithm with simulated annealing for feature selection[J]. Neurocomputing, 2017, 260: 302-312. doi: 10.1016/j.neucom.2017.04.053 [26] XIONG G J, ZHANG J, SHI D Y, et al. Parameter extraction of solar photovoltaic models using an improved whale optimization algorithm[J]. Energy Conversion and Management, 2018, 174: 388-405. doi: 10.1016/j.enconman.2018.08.053 [27] 孙琪, 于永进, 王玉彬, 等. 采用改进鲸鱼算法的配电网综合优化[J]. 电力系统及其自动化学报, 2021, 30(5): 22-29.SUN Q, YU Y J, WANG Y B, et al. Comprehensive optimization of distribution network with improved whale algorithm[J]. Proceedings of the Chinese Society of Universities for Electric Power System and its Automation, 2021, 30(5): 22-29(in Chinese). [28] 吴坤, 谭劭昌. 基于改进鲸鱼优化算法的无人机航路规划[J]. 航空学报, 2020, 41(S2): 724286.WU K, TAN S C. Route planning of UAV based on improved whale optimization algorithm[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(S2): 724286(in Chinese). [29] National Oceanic and Atmospheric Administration. U. S. standard atmosphere[S]. Washington D. C. : NOAA, NASA, USAF, 1976. -

 下载:
下载:








 点击查看大图
点击查看大图

计量
- 文章访问数: 178
- HTML全文浏览量: 73
- PDF下载量: 5
- 被引次数: 0
