



Heading enhancement algorithm of GNSS/IMU integrated navigation based on dual-antenna TDCP
-
摘要:
在全球导航卫星系统(GNSS)和惯性测量单元件(IMU)组合导航系统中,姿态估计尤其是航向角的准确估计对于车辆行驶状态的实时监控尤为重要。但由于IMU在高度通道上是发散的,若不加以准确约束其误差会逐渐累积,因此,在航向角变化频繁的车载应用中其航向角的估计精度不足。为解决传统GNSS与IMU松组合方式导航姿态估计精度较差的问题,提出一种基于双天线历元间载波相位差分(TDCP)的GNSS/IMU组合导航航向角增强算法。该算法通过双天线TDCP求解车辆航向角来增加组合导航滤波融合观测值输入维度,并利用Hatch滤波和抗差自适应滤波分别实现观测域伪距精度提升和GNSS/IMU组合导航定位、定姿性能的提升。实验结果表明:所提算法相对于传统GNSS/IMU组合导航方法在三维方向上的定位、测速精度分别提高了22.12%、41.27%,车辆航向角精度提高了46.29%。
-
关键词:
- GNSS/IMU组合导航 /
- 多天线 /
- 双天线历元间载波相位差分 /
- 抗差卡尔曼滤波 /
- 姿态精度
Abstract:In global navigation satellite system (GNSS) and inertial measurement units (IMU) integrated navigation systems, attitude estimation, especially the accurate heading estimation, is very important for the real-time monitoring of vehicle state. However, due to the divergence of IMU on the altitude channel, its errors will gradually accumulate if the IMU cannot be accurately constrained, so the estimation accuracy of the heading is insufficient in the vehicle application where the heading changes frequently. In order to solve the problem of poor attitude estimation accuracy in GNSS and IMU loosely coupled navigation, a heading enhancement algorithm of GNSS/IMU integrated navigation based on dual-antenna time-differenced carrier phase (TDCP) is proposed. The vehicle heading is solved by dual-antenna TDCP to increase the input dimension of observations in integrated navigation filtering, and the Hatch filter and robust adaptive filter are used to improve the pseudorange accuracy of the observation domain and the GNSS/IMU integrated navigation positioning and attitude estimation performance, respectively. The algorithm evaluation results based on the measured data show that compared with the traditional GNSS/IMU integrated navigation method, the proposed algorithm improves the positioning and velocity measurement accuracy by 22.12% and 41.27%, respectively, and the heading accuracy by 46.29%.
-
Key words:
- GNSS/IMU integrated navigation /
- multiple antennas /
- TDCP /
- robust Kalman filtering /
- attitude accuracy
-

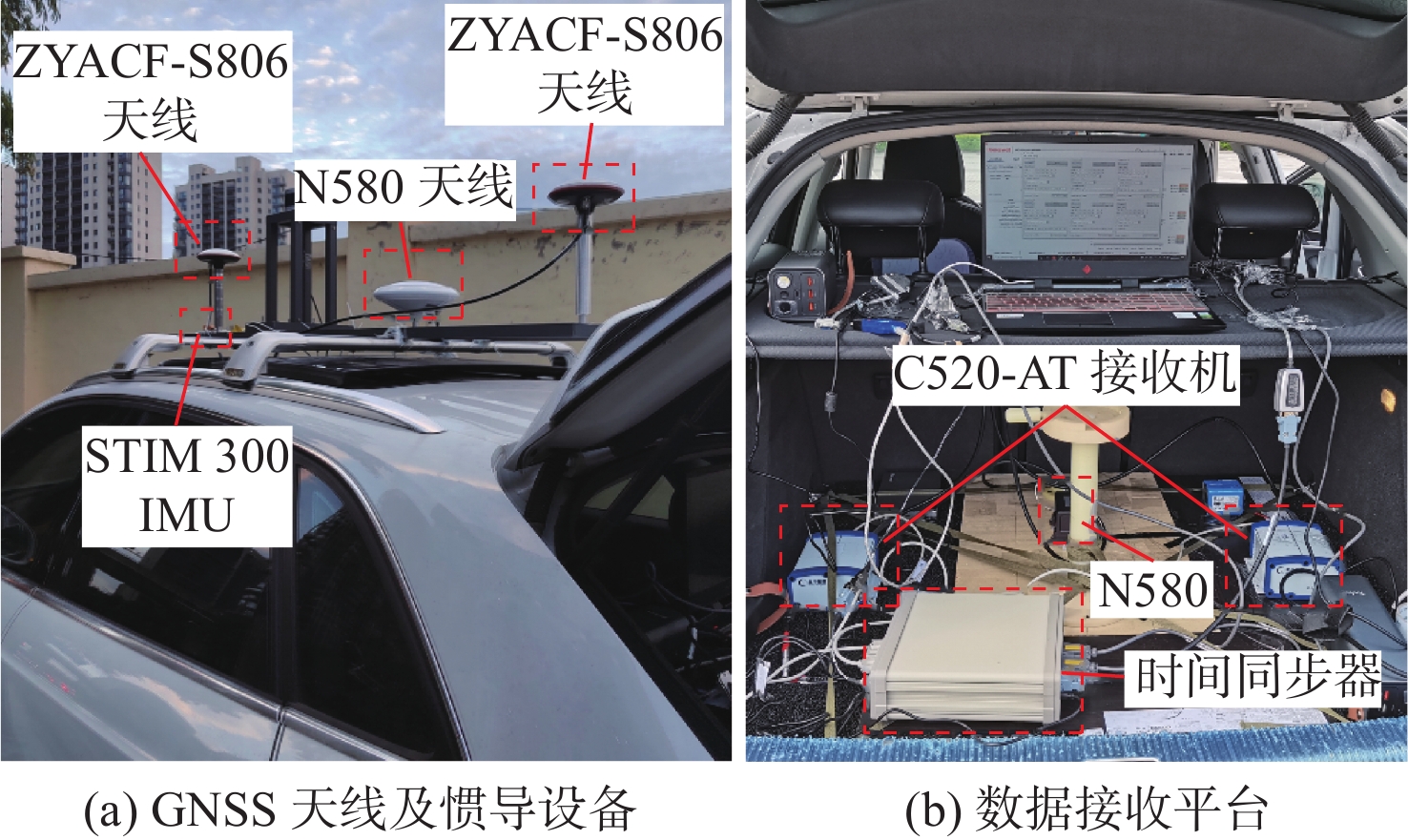
图 5 实验车及搭载的实验设备
Figure 5. The experimental vehicle and the experimental equipment onboard

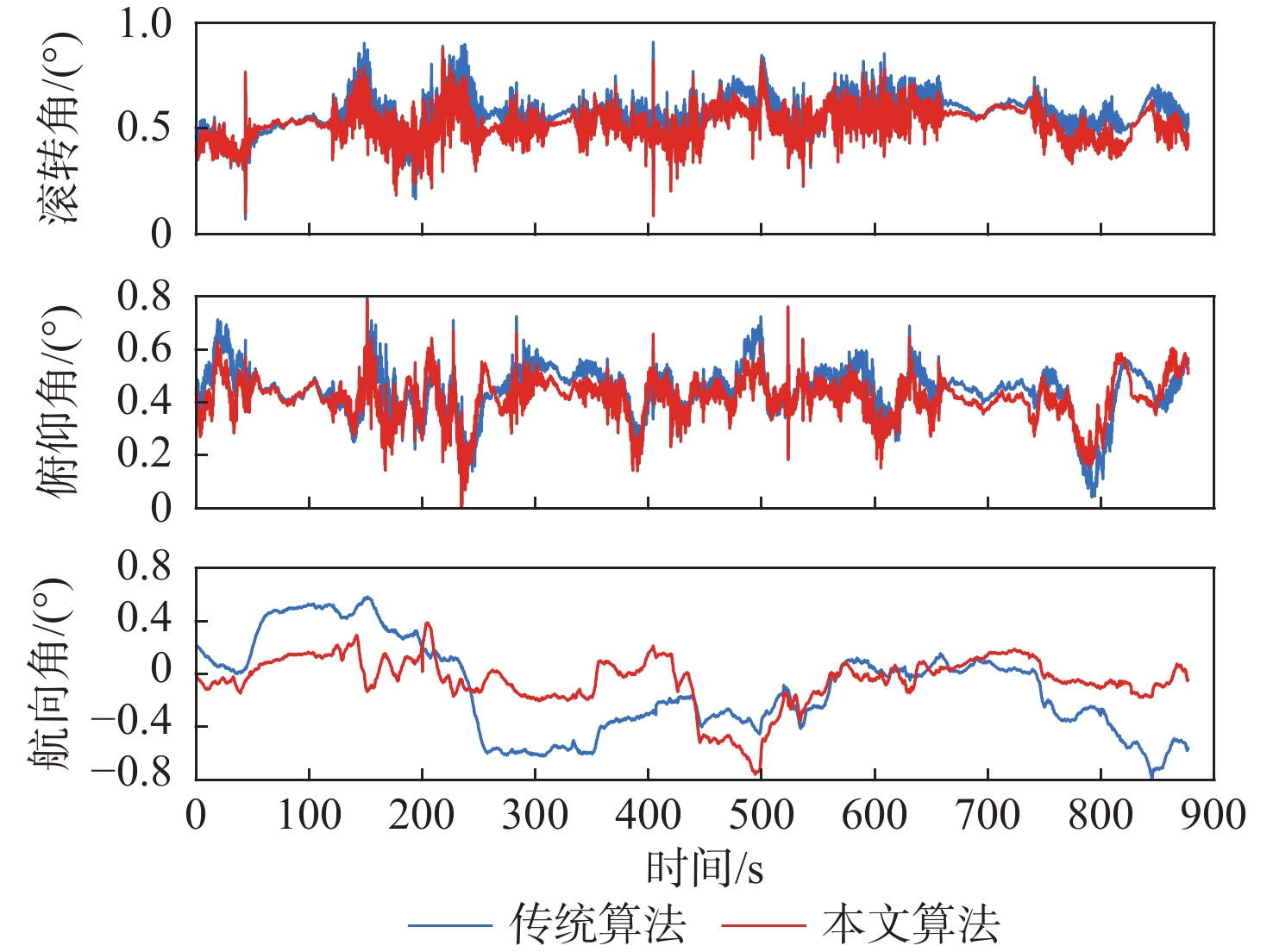
图 10 不同行驶状态下的车辆航向角估计结果
Figure 10. Vehicle heading estimation results under different driving state
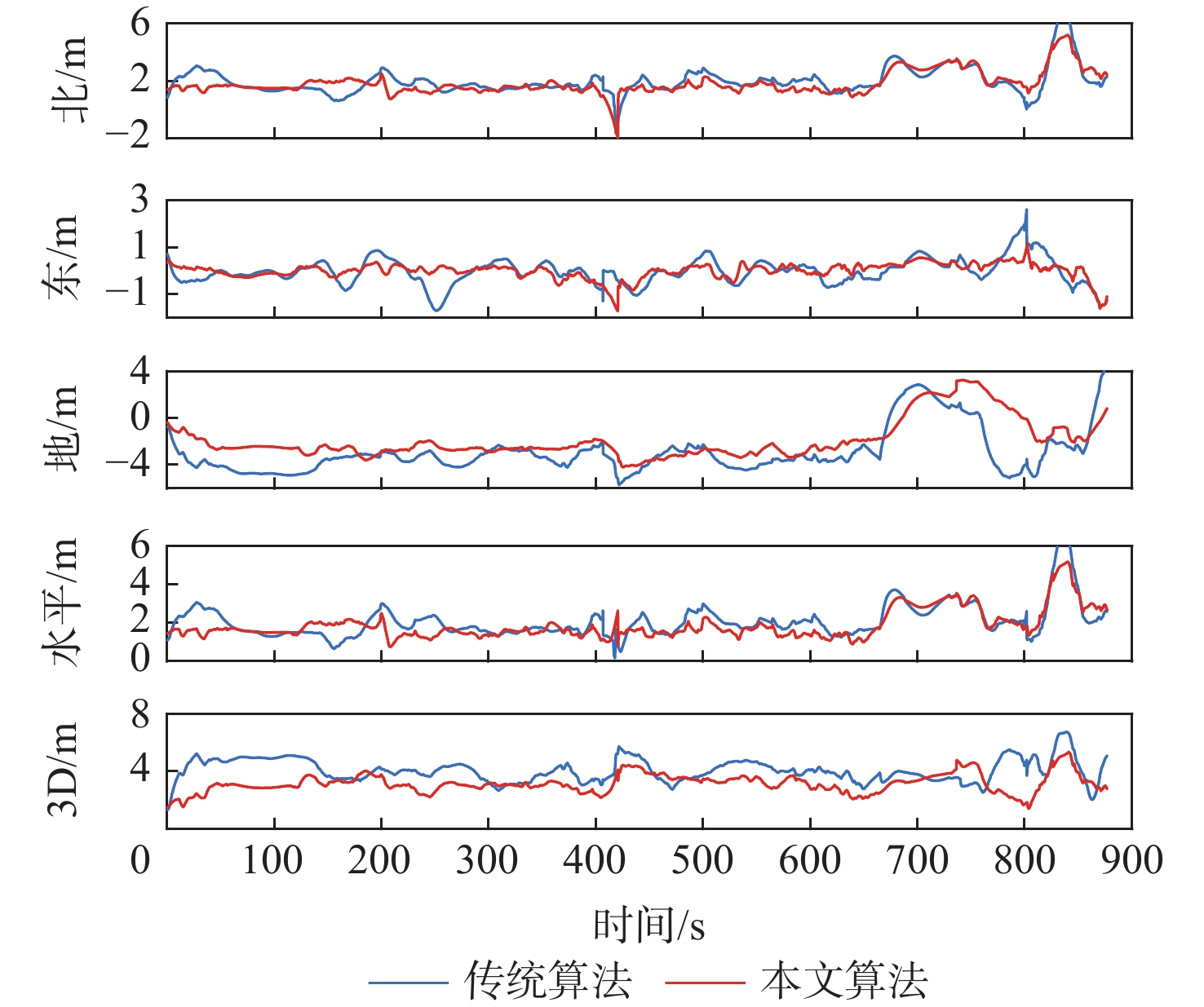
表 1 算法定位误差均方根对比
Table 1. Position RMSE comparison of the algorithms
对比算法 北向RMSE/m 东向RMSE/m 地向RMSE/m 水平RMSE/m 3D RMSE/m 传统算法 2.1823 0.5544 3.4678 2.2516 4.1346 本文算法 2.0027 0.3397 2.4984 2.0313 3.2200  下载: 导出CSV
下载: 导出CSV
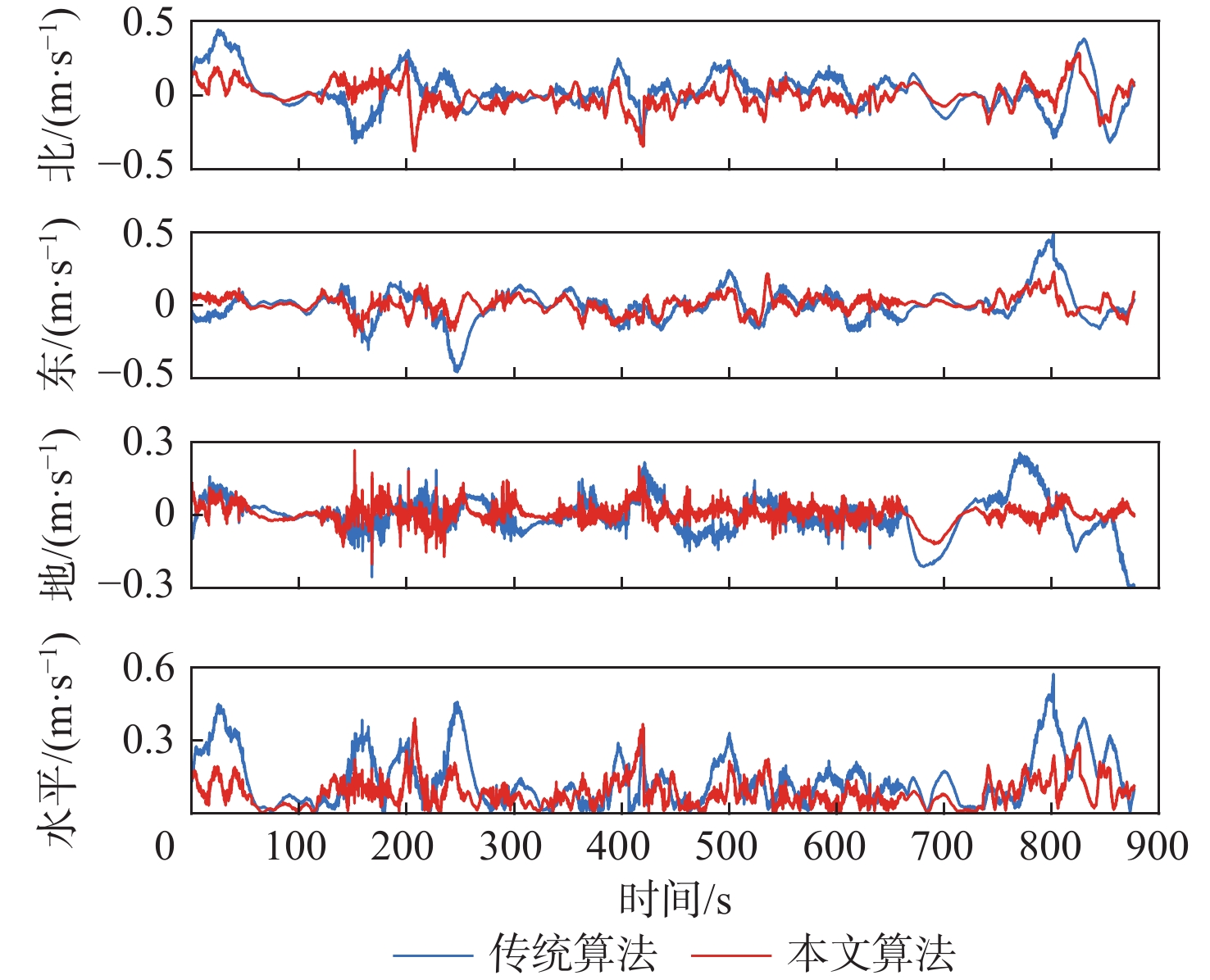
表 2 算法测速误差均方根对比
Table 2. Velocity RMSE comparison of the algorithms
对比算法 北向
RMSE/m东向
RMSE/m地向
RMSE/m水平
RMSE/m传统算法 0.1318 0.1153 0.0804 0.1751 本文算法 0.0841 0.0592 0.0385 0.1028
下载: 导出CSV
表 3 算法定姿误差均方根对比
Table 3. Attitude RMSE comparison of the algorithms
对比算法 滚转RMSE/(°) 俯仰RMSE/(°) 航向RMSE/(°) 传统算法 0.5740 0.4538 0.3603 本文算法 0.5253 0.4225 0.1935
下载: 导出CSV
-
[1] FREDA P, ANGRISANO A, GAGLIONE S, et al. Time-differenced carrier phases technique for precise GNSS velocity estimation[J]. GPS Solutions, 2015, 19(2): 335-341. doi: 10.1007/s10291-014-0425-1 [2] JI L, SUN R, CHENG Q, et al. Evaluation of the performance of GNSS-based velocity estimation algorithms[J]. Satellite Navigation, 2022, 3(1): 18. doi: 10.1186/s43020-022-00080-4 [3] SUN R, CHENG Q, WANG J H. Precise vehicle dynamic heading and pitch angle estimation using time-differenced measurements from a single GNSS antenna[J]. GPS Solutions, 2020, 24(3): 84. doi: 10.1007/s10291-020-01000-2 [4] KIM J, PARK M, BAE Y, et al. A low-cost, high-precision vehicle navigation system for deep urban multipath environment using TDCP measurements[J]. Sensors, 2020, 20(11): 3254. doi: 10.3390/s20113254 [5] CHEN K, CHANG G, CHEN C, et al. An improved TDCP-GNSS/INS integration scheme considering small cycle slip for low-cost land vehicular applications[J]. Measurement Science and Technology, 2021, 32(5): 055006. doi: 10.1088/1361-6501/abd96c [6] JIAN W L, DONG Y, WANG D J, et al. A modified TDCP/INS tightly coupled navigation[C]//Proceedings of the China Satellite Navigation Conference. Berlin: Springer, 2019: 503-512. [7] XU G C. GPS: theory, algorithms and applications[M]. Berlin: Springer, 2007. [8] 甘雨, 隋立芬, 张清华, 等. 利用时间差分载波相位的GNSS/INS紧组合导航[J]. 测绘通报, 2015(6): 5-8.GAN Y, SUI L F, ZHANG Q H, et al. GNSS/INS integrated navigation using time-differenced carrier phase measurements[J]. Bulletin of Surveying and Mapping, 2015(6): 5-8(in Chinese). [9] QIAN N J, CHANG G B, GAO J X. GNSS pseudorange and time-differenced carrier phase measurements least-squares fusion algorithm and steady performance theoretical analysis[J]. Electronics Letters, 2019, 55(23): 1238-1241. doi: 10.1049/el.2019.2408 [10] LI F C, GAO J X, ZHENG N S, et al. A novel dual-domain filtering method to improve GNSS performance based on a dynamic model constructed by TDCP[J]. IEEE Access, 2020, 8: 79716-79723. doi: 10.1109/ACCESS.2020.2990132 [11] ZHANG Q H, CHEN Z S, RONG F J, et al. An improved Hatch filter and its application in kinematic positioning with single-frequency GPS[J]. Measurement, 2019, 146: 868-878. doi: 10.1016/j.measurement.2019.07.030 [12] LEE H K, RIZOS C. Position-domain Hatch filter for kinematic differential GPS/GNSS[J]. IEEE Transactions on Aerospace and Electronic Systems, 2008, 44(1): 30-40. doi: 10.1109/TAES.2008.4516987 [13] PARK B, LIM C, YUN Y, et al. Optimal divergence-free hatch filter for GNSS single-frequency measurement[J]. Sensors, 2017, 17(3): 448. doi: 10.3390/s17030448 [14] 陈正生, 张清华, 李林阳, 等. 电离层延迟变化自模型化的载波相位平滑伪距算法[J]. 测绘学报, 2019, 48(9): 1107-1118.CHEN Z S, ZHANG Q H, LI L Y, et al. An improved carrier phase smoothing pseudorange algorithm with self-modeling of ionospheric delay variation[J]. Acta Geodaetica et Cartographica Sinica, 2019, 48(9): 1107-1118(in Chinese). [15] 范士杰, 孔祥元. 基于Hatch滤波的GPS伪距相位平滑及其在单点定位中的应用[J]. 勘察科学技术, 2007(4): 40-42.FAN S J, KONG X Y. GPS carrier phase smoothing on code pseudorange based on the hatch filter and its application in point positioning[J]. Site Investigation Science and Technology, 2007(4): 40-42(in Chinese). [16] 陈正生, 张清华, 崔阳, 等. 单频载波相位移动开窗平滑伪距算法及精度分析[J]. 武汉大学学报(信息科学版), 2020, 45(7): 964-973.CHEN Z S, ZHANG Q H, CUI Y, et al. Single frequency carrier smoothing pseudorange algorithm and accuracy analysis based on moving window[J]. Geomatics and Information Science of Wuhan University, 2020, 45(7): 964-973(in Chinese). [17] 杨元喜, 何海波, 徐天河. 论动态自适应滤波[J]. 测绘学报, 2001, 30(4): 293-298.YANG Y X, HE H B, XU T H. Adaptive robust filtering for kinematic GPS positioning[J]. Acta Geodaetica et Cartographic Sinica, 2001, 30(4): 293-298(in Chinese). [18] 杨元喜, 任夏, 许艳. 自适应抗差滤波理论及应用的主要进展[J]. 导航定位学报, 2013, 1(1): 9-15.YANG Y X, REN X, XU Y. Main progress of adaptively robust filter with applications in navigation[J]. Journal of Navigation and Positioning, 2013, 1(1): 9-15(in Chinese). [19] GAGLIONE S, ANGRISANO A, CROCETTO N. Robust Kalman filter applied to GNSS positioning in harsh environment[C]//Proceedings of the European Navigation Conference. Piscataway: IEEE Press, 2019: 1-6. [20] HE W, LIAN B W, TANG C K. GNSS/INS integrated navigation system based on adaptive robust Kalman filter restraining outliers[C]//Proceedings of the IEEE/CIC International Conference on Communications in China-Workshops. Piscataway: IEEE Press, 2014: 32-35. [21] KIM L, LEE Y, LEE H K. Kalman–Hatch dual-filter integrating global navigation satellite system/inertial navigation system/on-board diagnostics/altimeter for precise positioning in urban canyons[J]. IET Radar, Sonar & Navigation, 2022, 16(2): 379-397. [22] 王坚, 刘超, 高井祥, 等. 基于抗差EKF的GNSS/INS紧组合算法研究[J]. 武汉大学学报(信息科学版), 2011, 36(5): 596-600.WANG J, LIU C, GAO J X, et al. GNSS/INS tightly coupled navigation model based on robust EKF[J]. Geomatics and Information Science of Wuhan University, 2011, 36(5): 596-600(in Chinese). [23] CHEN Q J, ZHANG Q, NIU X J. Estimate the pitch and heading mounting angles of the IMU for land vehicular GNSS/INS integrated system[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 22(10): 6503-6515. doi: 10.1109/TITS.2020.2993052 -

 下载:
下载:






 点击查看大图
点击查看大图

计量
- 文章访问数: 804
- HTML全文浏览量: 171
- PDF下载量: 6
- 被引次数: 0
