



Railway foreign objects tracking detection based on spatial location and feature generalization enhancement
-
摘要:
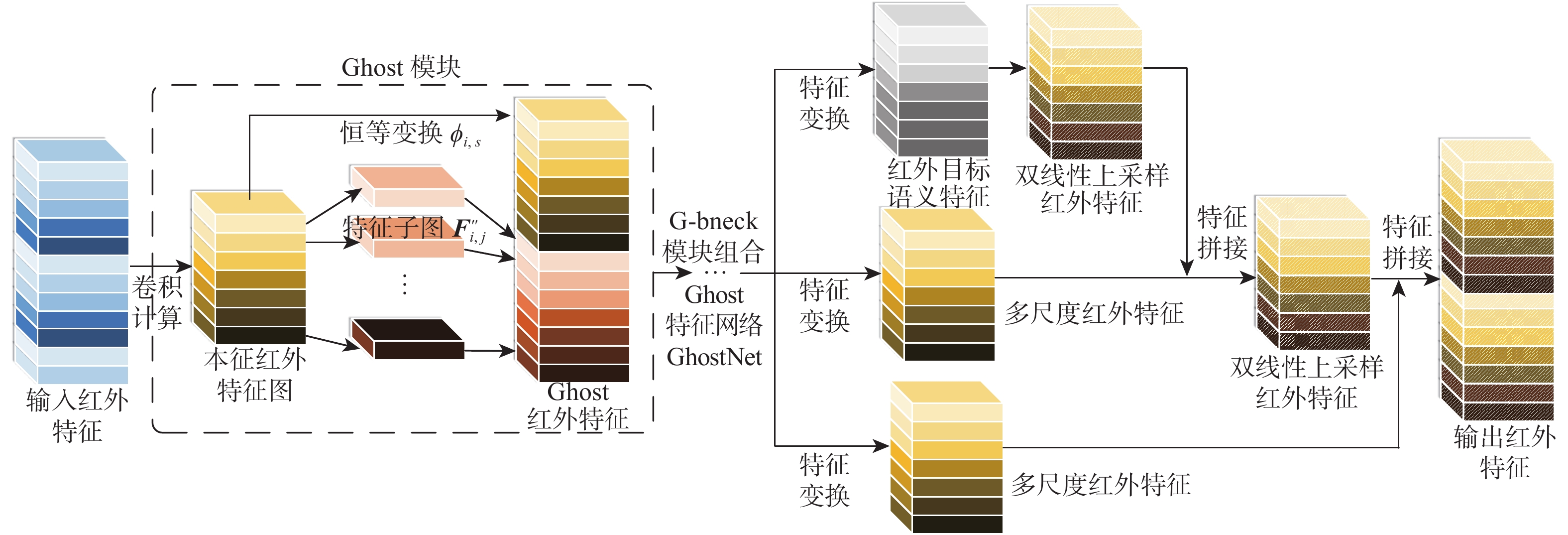
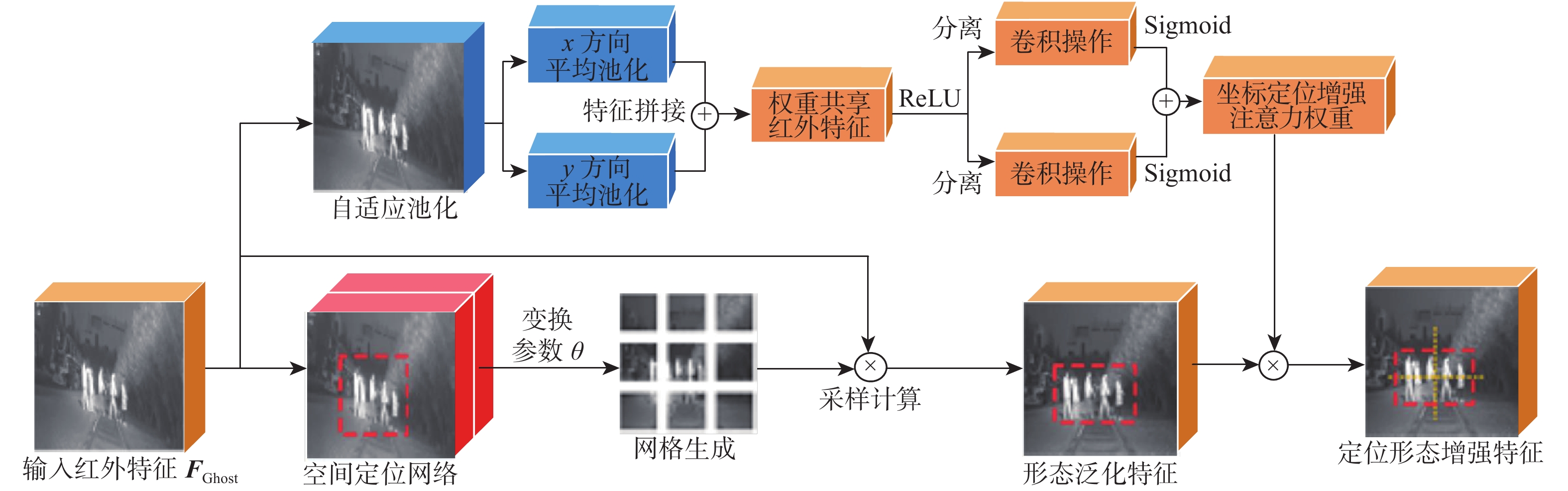
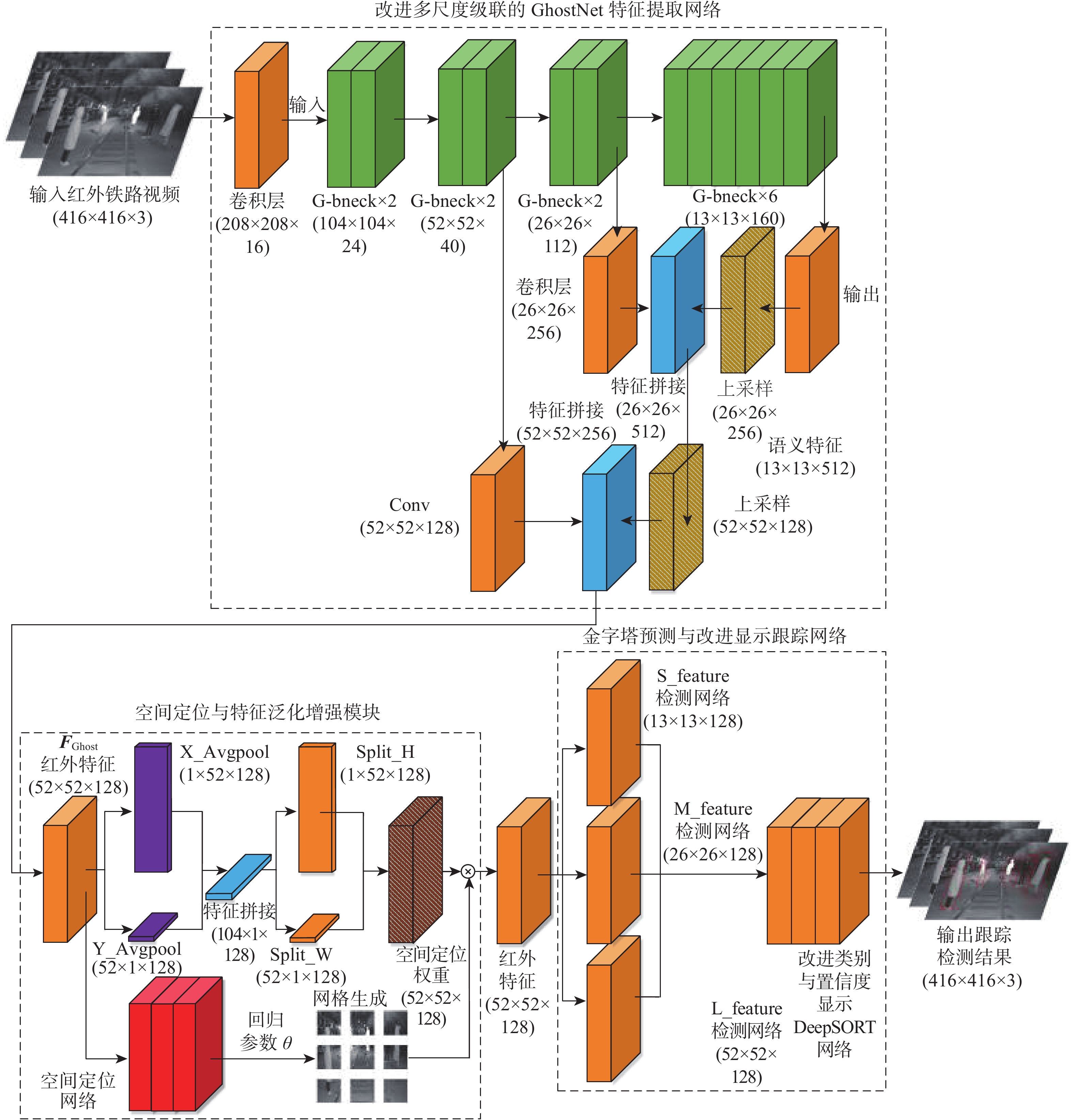
针对现有深度学习异物跟踪检测算法易受复杂环境、目标遮挡等影响,导致出现漏检及检测精度低等问题,提出了一种空间定位与特征泛化增强的铁路异物跟踪检测算法。提出改进多尺度级联GhostNet特征提取网络,提升对红外目标的特征提取能力;利用异物空间位置定位与泛化形态信息,设计空间定位与特征泛化增强模块,增强对复杂场景下位置移动与跟踪轨迹变化目标的检测精度;构建金字塔预测网络,得到红外铁路异物的检测锚框、类别及置信度信息;通过改进类别和置信度显示的DeepSORT跟踪算法,结合卡尔曼滤波与匈牙利算法实现红外弱光环境下铁路异物跟踪检测。实验结果表明:所提算法对铁路异物的跟踪检测精确度达到83.3%,平均检测速度为11.3帧/s;与比较算法相比,所提算法检测精度更高,对红外弱光场景下铁路异物跟踪检测具有较好的性能。
Abstract:There are factors of complex environments, target occlusion, and others. These factors lead to the lack of detection and low detection accuracy of existing depth learning foreign object tracking algorithms.A railway foreign object tracking technique based on spatial location and feature generalization enhancement is proposed to address the issues with the current deep learning video tracking system. The multi-scale cascaded GhostNet network is used to improve the feature extraction ability of the model. The infrared features are enhanced by spatial location and feature generalization module. The module combined with infrared foreign object spatial location and generalization morphology.The detection accuracy of the network is enhanced. The detection anchor size, target kind, and confidence of infrared railway foreign materials are obtained by using the pyramid prediction network. The DeepSORT tracking algorithm which improved category and confidence combined with Kalman filtering and the Hungarian algorithm is used to track railway foreign objects in an infrared weak light environment. The experimental results show that the tracking precision of the proposed algorithm for infrared targets reaches 83.3%, and the average detection rate of the proposed method is 11.3 frames per second. Compared with the comparison method, the proposed algorithm has good performance for tracking railway foreign objects in infrared weak light scenes.
-
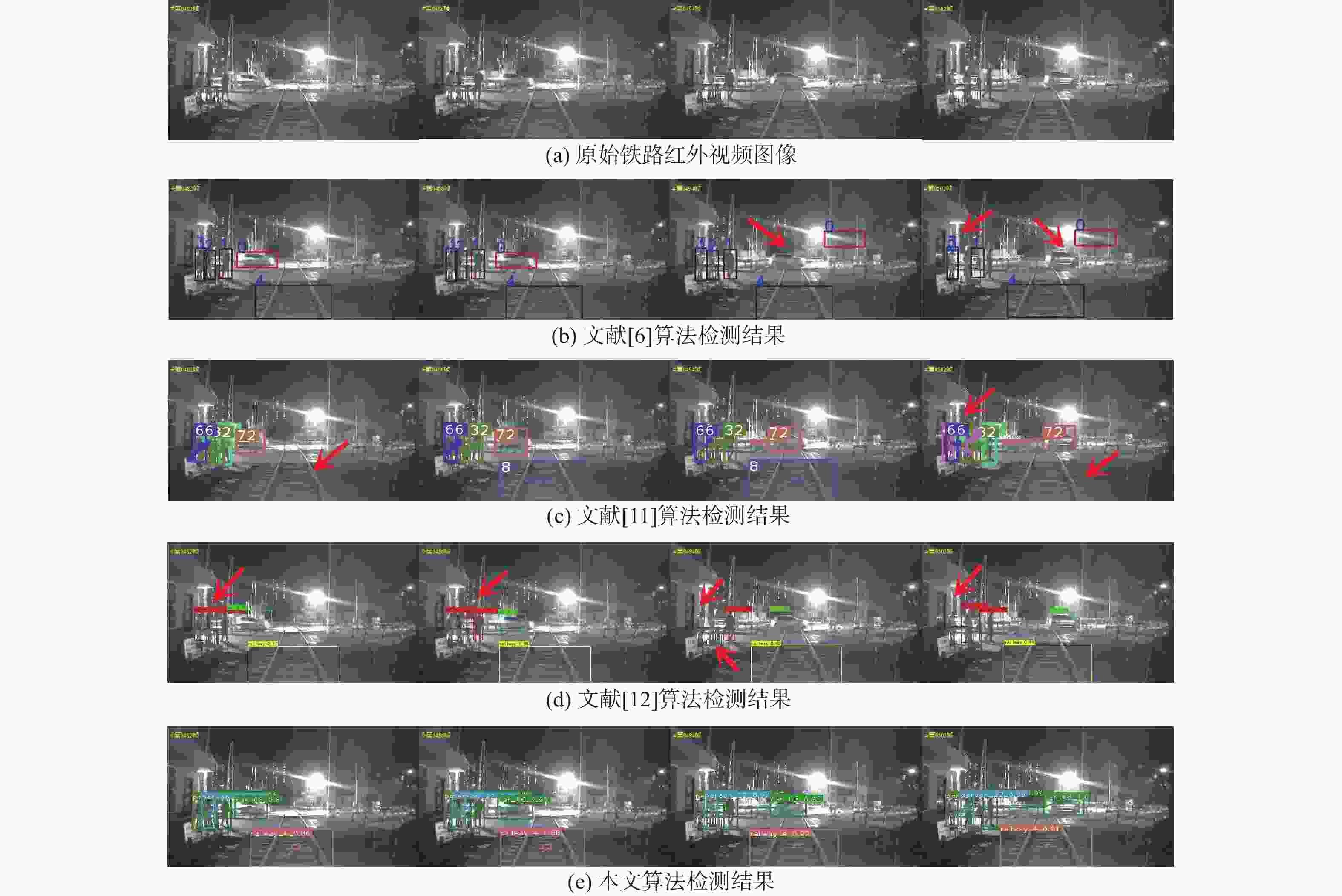
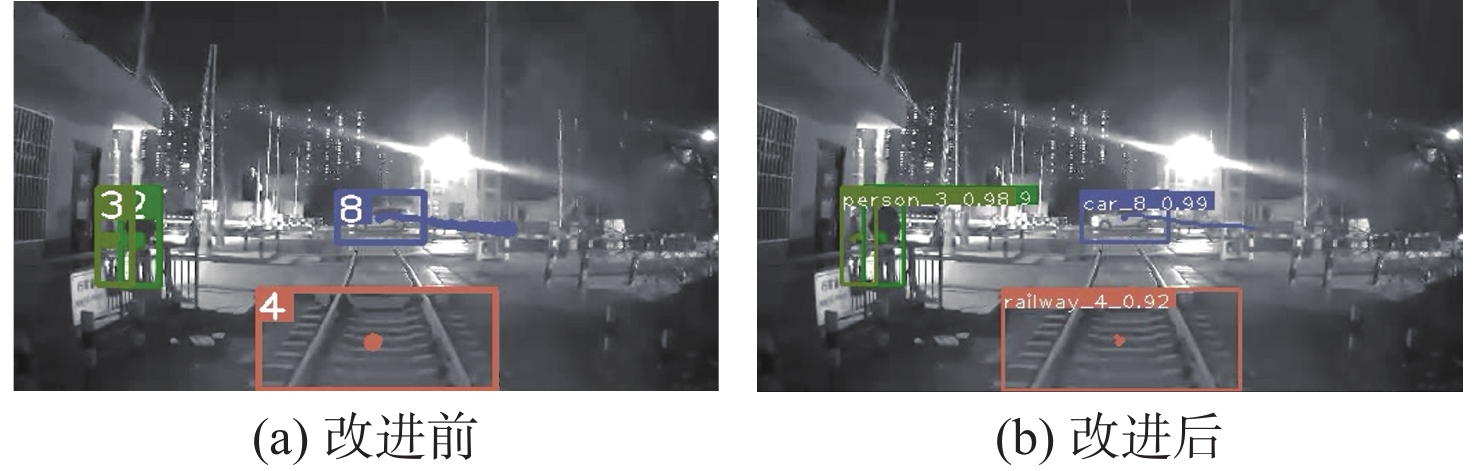
图 8 红外铁路异物侵限跟踪检测实验结果
Figure 8. Tracking detection experiment results of infrared railway foreign body intrusion
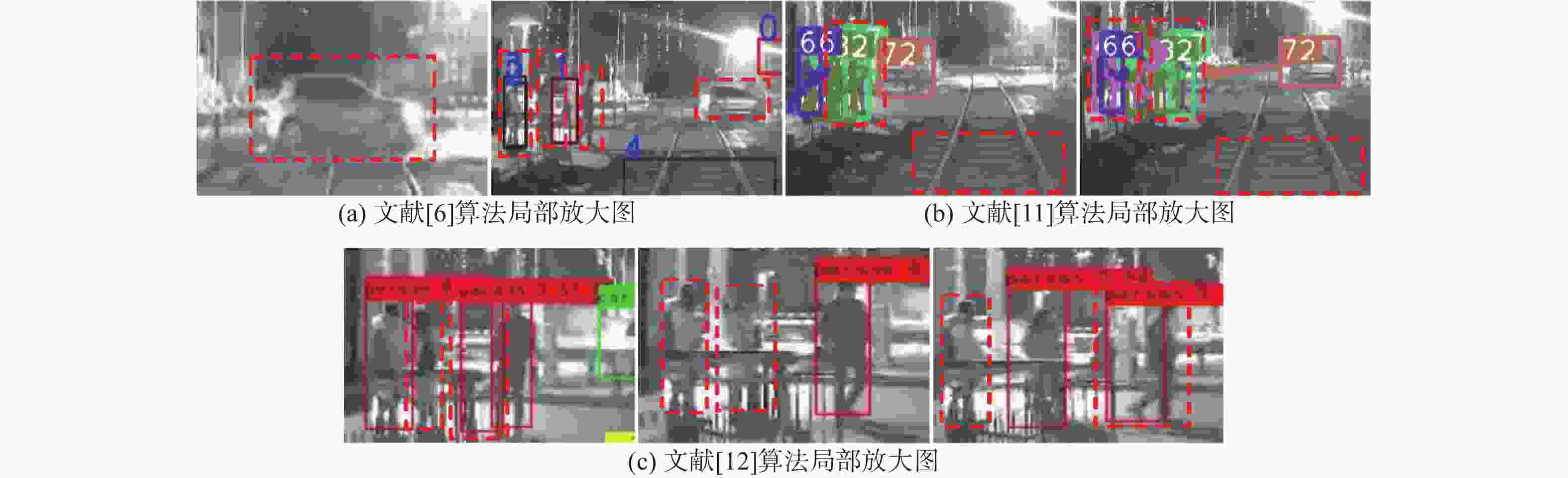
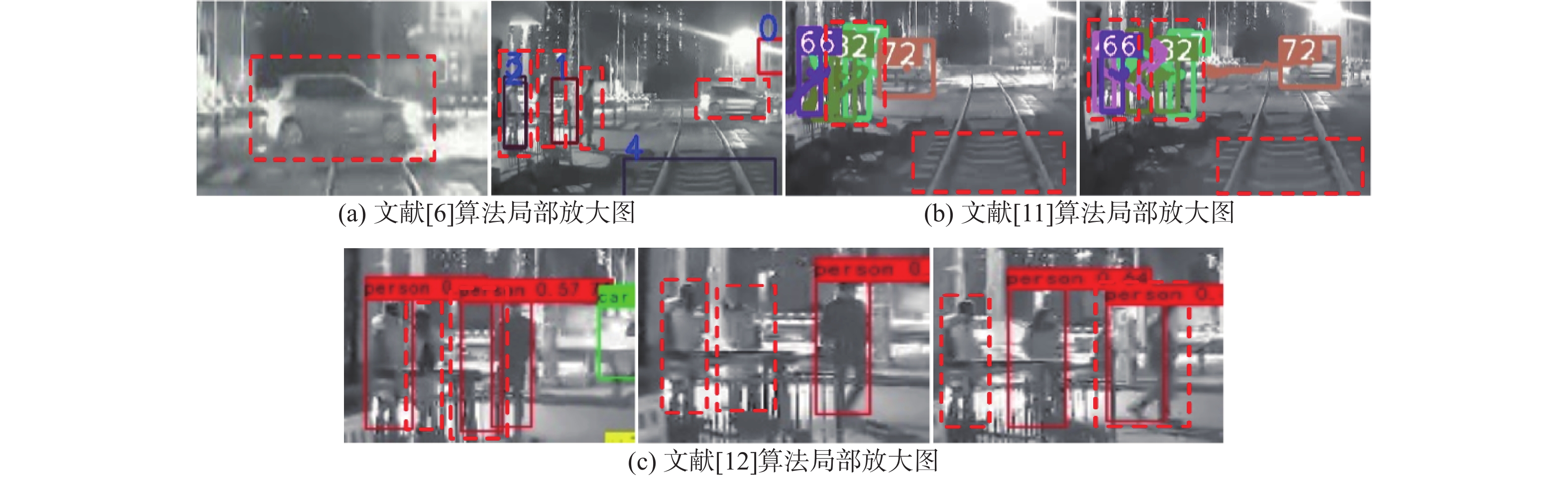
图 9 红外铁路异物侵限跟踪检测局部放大图
Figure 9. Partial enlarged image of infrared railway foreign body intrusion tracking
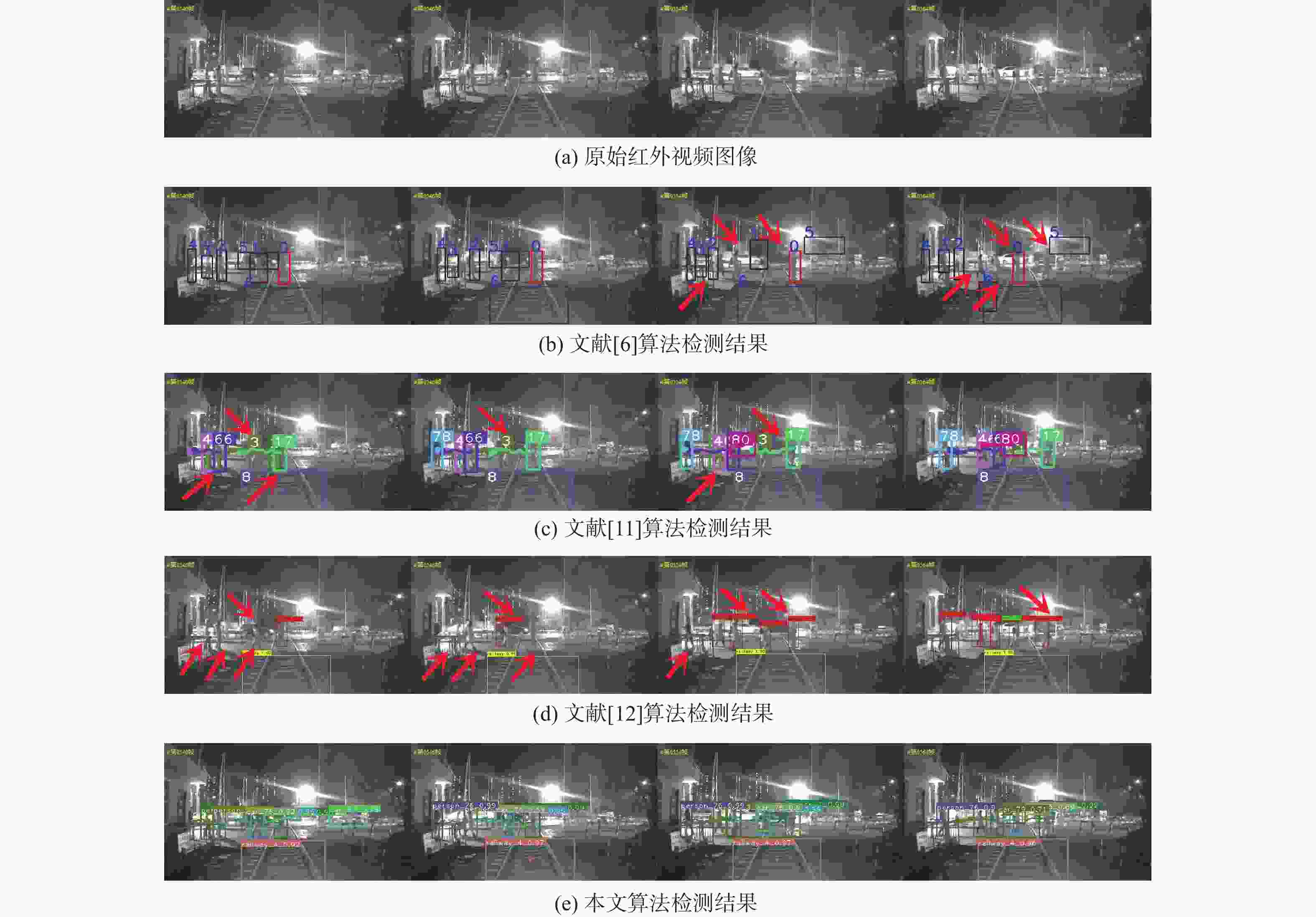
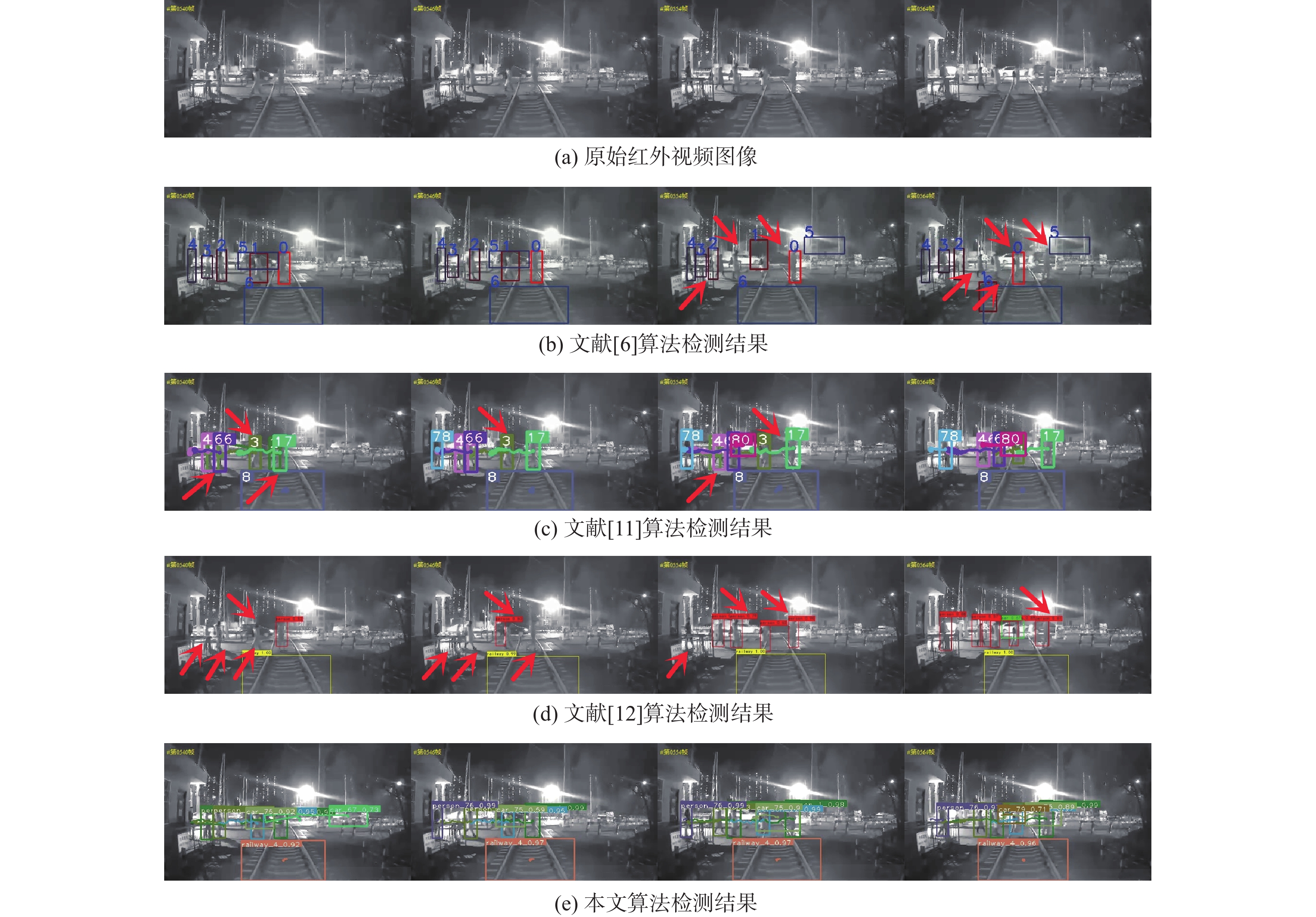
图 10 遮挡异物侵限跟踪检测实验结果
Figure 10. Tracking detection experiment results of occluded foreign objects intrusion
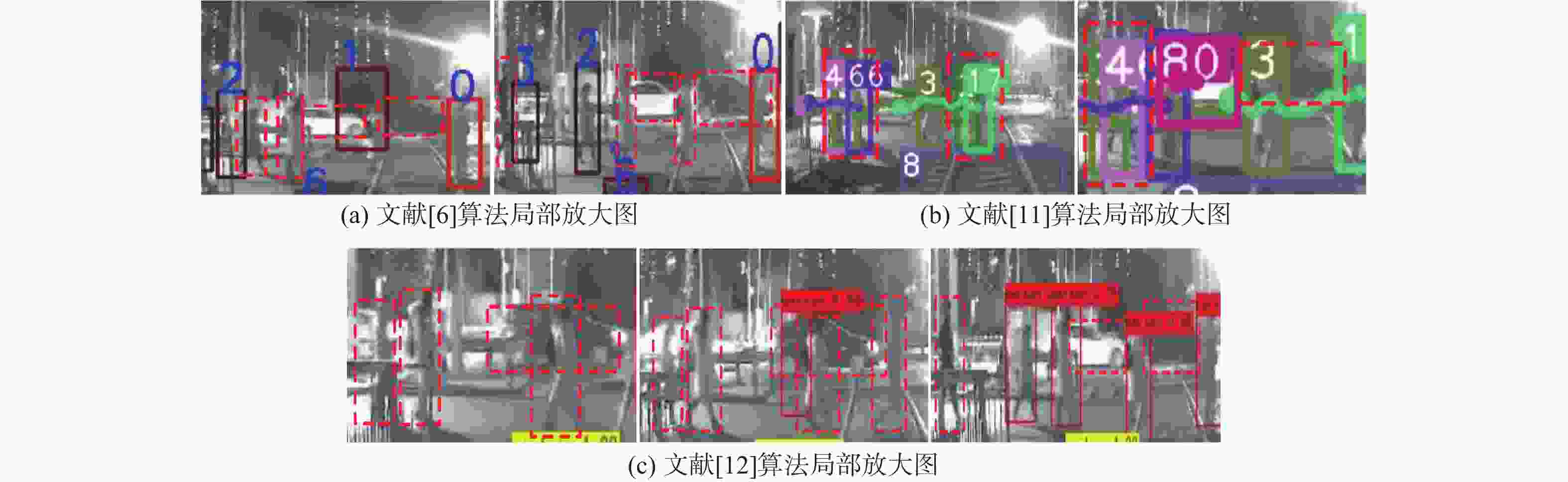
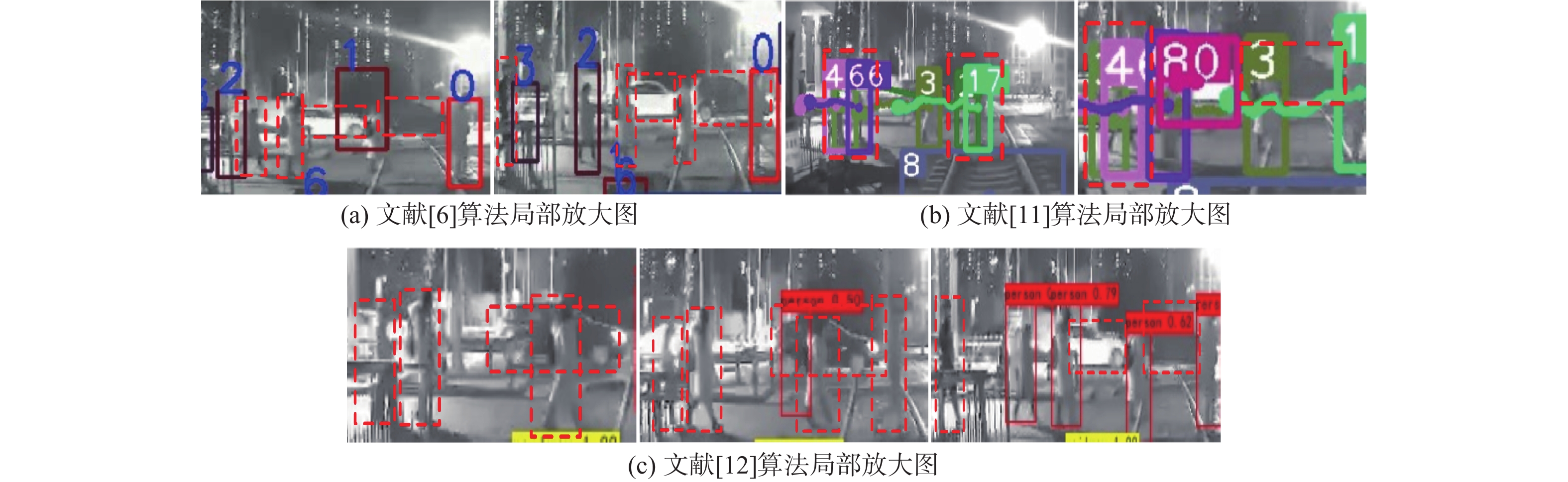
图 11 遮挡异物侵限跟踪检测局部放大图
Figure 11. Partial enlarged image of occluded foreign object intrusion tracking
表 1 不同网络参数量与尺寸对比实验结果
Table 1. Results of parameter quantity and size comparison experiment under different networks
网络 参数量/个 计算速度/s 模型尺寸/MB Resnet50 32 664 262 0.82 124.60 CSP-Darknet53 64 040 001 0.94 244.29 改进后GhostNet(本文) 11 105 445 0.78 42.36  下载: 导出CSV
下载: 导出CSV
表 2 不同异物跟踪检测算法性能对比
Table 2. Performance comparison of different foreign body tracking methods
下载: 导出CSV
表 3 模型消融实验比较
Table 3. Comparison of ablation experiment
基准 级联增强
特征提取
网络空间定位与
特征泛化
增强金字塔
预测网络所提
DeepSORT
网络多目标检测
精确度/%√ √ 59.7 √ √ √ 67.1 √ √ √ √ 78.6 √ √ √ √ √ 83.3
下载: 导出CSV
-
[1] LI C, XIE Z Y, QIN Y, et al. A multi-scale image and dynamic candidate region-based automatic detection of foreign targets intruding the railway perimeter[J]. Measurement, 2021, 185: 109853. doi: 10.1016/j.measurement.2021.109853 [2] LI Y D, LIU Y, DONG H, et al. Intrusion detection of railway clearance from infrared images using generative adversarial networks[J]. Journal of Intelligent & Fuzzy Systems, 2021, 40(3): 3931-3943. [3] WANG Y, LI Y, HAN Q. Vehicle-mounted infrared pedestrian tracking based on scale adaptive kernel correlation filter[J]. IAENG International Journal of Computer Science, 2022, 49(2): 349-356. [4] HU J W, LIU R X, CHEN Z H, et al. Octave convolution-based vehicle detection using frame-difference as network input[J]. The Visual Computer, 2023, 39(4): 1503-1515. [5] 艾明晶, 单国志, 刘鹏高, 等. 基于朝向约束和重识别特征的目标轨迹关联方法[J]. 北京麻豆精品秘 国产传媒学报, 2022, 48(6): 957-967.AI M J, SHAN G Z, LIU P G, et al. Target trajectory association method based on orientation constraint and re-identification feature[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(6): 957-967(in Chinese). [6] LI S H, ZHAO L H. A low-cost and fast vehicle detection algorithm with a monocular camera for adaptive driving beam systems[J]. IEEE Access, 2021, 9: 26147-26155. doi: 10.1109/ACCESS.2021.3057862 [7] YAO T T, HU J C, ZHANG B, et al. Scale and appearance variation enhanced Siamese network for thermal infrared target tracking[J]. Infrared Physics & Technology, 2021, 117: 103825. [8] LIU F Y, LIU J, WANG L B. Deep learning and infrared thermography for asphalt pavement crack severity classification[J]. Automation in Construction, 2022, 140: 104383. doi: 10.1016/j.autcon.2022.104383 [9] XU Y, FAN Q. A lightweight convolutional network for infrared object detection and tracking[J]. Journal of Physics: Conference Series, 2022, 2234(1): 012004. doi: 10.1088/1742-6596/2234/1/012004 [10] LI G F, CHEN X, LI M J, et al. One-shot multi-object tracking using CNN-based networks with spatial-channel attention mechanism[J]. Optics & Laser Technology, 2022, 153: 108267. [11] YANG S D, CHEN Z H, MA X M, et al. Real-time high-precision pedestrian tracking: A detection-tracking-correction strategy based on improved SSD and Cascade R-CNN[J]. Journal of Real-Time Image Processing, 2022, 19(2): 287-302. doi: 10.1007/s11554-021-01183-y [12] LEE T Y, JEONG M H, PETER A. Object detection of road facilities using YOLOv3 for high-definition map updates[J]. Sensors and Materials, 2022, 34(1): 251. doi: 10.18494/SAM3732 [13] CUI F, NING M W, SHEN J W, et al. Automatic recognition and tracking of highway layer-interface using Faster R-CNN[J]. Journal of Applied Geophysics, 2022, 196: 104477. doi: 10.1016/j.jappgeo.2021.104477 [14] SOLIMAN N F, ALABDULKREEM E A, ALGARNI A D, et al. Efficient deep learning modalities for object detection from infrared images[J]. Computers, Materials & Continua, 2022, 72(2): 2545-2563. [15] WU S J, ZHANG K, LI S Y, et al. Aircraft tracking in infrared imagery with adaptive learning and interference suppression[J]. Electronics Letters, 2021, 57(16): 636-638. doi: 10.1049/ell2.12209 [16] ZHAO C H, WANG J P, SU N, et al. Low contrast infrared target detection method based on residual thermal backbone network and weighting loss function[J]. Remote Sensing, 2022, 14(1): 177. doi: 10.3390/rs14010177 [17] CHANG B R, TSAI H F, HSIEH C W, et al. Chip contour detection based on real-time image sensing and recognition[J]. Sensors and Materials, 2022, 34(3): 1077. doi: 10.18494/SAM3378 [18] YANG B, ZHANG Y. Localization and tracking of closely-spaced human targets based on infrared sensors[J]. Infrared Physics & Technology, 2022, 123: 104176. doi: 10.1016/j.infrared.2022.104176 [19] JADERBERG M, SIMONYAN K, ZISSERMAN A, et al. Spatial transformer networks[EB/OL]. (2016-02-04)[2022-12-01]. http://arxiv.org/abs/1506.02025. [20] YANG F, LI W, LIANG B B, et al. Multi-stage attention network for video-based person re-identification[J]. IET Computer Vision, 2022, 16(5): 445-455. doi: 10.1049/cvi2.12100 [21] CUI Y M, JIANG L H, LIU S Y, et al. Fast and accurate obstacle detection of manipulator in complex human-machine interaction workspace[J]. Measurement Science and Technology, 2022, 33(8): 085402. doi: 10.1088/1361-6501/ac5f2a [22] PAIK C, KIM H J. Improving object detection, multi-object tracking, and re-identification for disaster response drones[EB/OL]. (2022-01-05)[2022-12-01]. http://arxiv.org/abs/2201.01494. [23] KUSHNIR D. Methods and means for small dynamic objects recognition and tracking[J]. Computers, Materials & Continua, 2022, 73(2): 3649-3665. -

 下载:
下载:



 点击查看大图
点击查看大图
计量
- 文章访问数: 627
- HTML全文浏览量: 158
- PDF下载量: 32
- 被引次数: 0
