



Three-dimensional complete coverage flight path planning for high-altitude long-endurance solar-powered UAV
-
摘要:
临近空间太阳能无人机(UAVs)具有超长航时的特点,可以有效解决传统无人机任务期间续航能力不足的问题,提出大跨时间空间场景下基于“点对面”覆盖任务的太阳能无人机三维(3D)路径规划方法,在能量获取及转换有限的情况下通过对太阳能与重力势能合理分配与调度实现任务效能的最大化。在建立太阳辐照模型、能量系统模型的基础上,采用分段能量管理策略对24 h跨昼夜任务周期进行能源分配与调度及飞行阶段划分,定义每个阶段的目标函数及边界条件,引入高斯伪谱法(GPM)求解该多阶段多目标最优控制问题。引入旋转卡壳算法(RCA)求解凸多边形区域全覆盖路径规划(CPP)问题,结合最大太阳辐照路径与最佳覆盖任务路径进行多目标优化,并与传统全覆盖路径规划算法进行对比验证;联合高斯伪谱法及旋转卡壳算法求解具有能量约束和任务约束的三维航迹规划问题。仿真结果表明:在随机任意生成的凸多边形区域内,所提方法在满足太阳能无人机昼夜能量闭环的基础上,平均太阳辐照功率提升了11.64%,全覆盖任务路径降低了10.9%,显著提高了太阳能无人机的任务效能,实现了能源效用的最大化。
Abstract:Near-space solar-powered UAVs, characterized by their ultra-long endurance, can effectively solve the issue of insufficient endurance faced by traditional UAVs during missions. This paper proposed a three-dimensional (3D) path planning method for solar-powered UAVs based on “point to surface” coverage missions across large-scale spatiotemporal scenarios. Under the constraints of limited energy acquisition and conversion, the method maximized mission efficiency through reasonable distribution and scheduling of solar energy and gravitational potential energy. Based on the solar irradiance model and energy system model, a segmented energy management strategy was used to allocate and schedule the energy and divide the flight phases of the 24-hour mission cycle. The objective functions and boundary conditions of each phase were defined, and the Gauss pseudospectral method (GPM) was introduced to solve the multi-phase and multi-objective optimal control problem. The rotating calipers algorithm (RCA) was introduced to solve the full coverage path planning (CPP) problem of the convex polygon area. A multi-objective optimization was performed by combining the maximum solar irradiation path and the optimal coverage mission path, and the results were compared with the traditional CPP algorithm. The GPM and the RCA were combined to solve the 3D complete coverage flight path planning problem with energy and mission constraints. The simulation results show that, within the randomly generated convex polygon area, the proposed joint optimization method can increase the average solar irradiation power by 11.64% and reduce the complete coverage mission path by 10.9% while satisfying the day-night energy closed-loop of the solar-powered UAV, significantly improving the mission efficiency of solar-powered UAVs and maximizing the energy utilization.
-
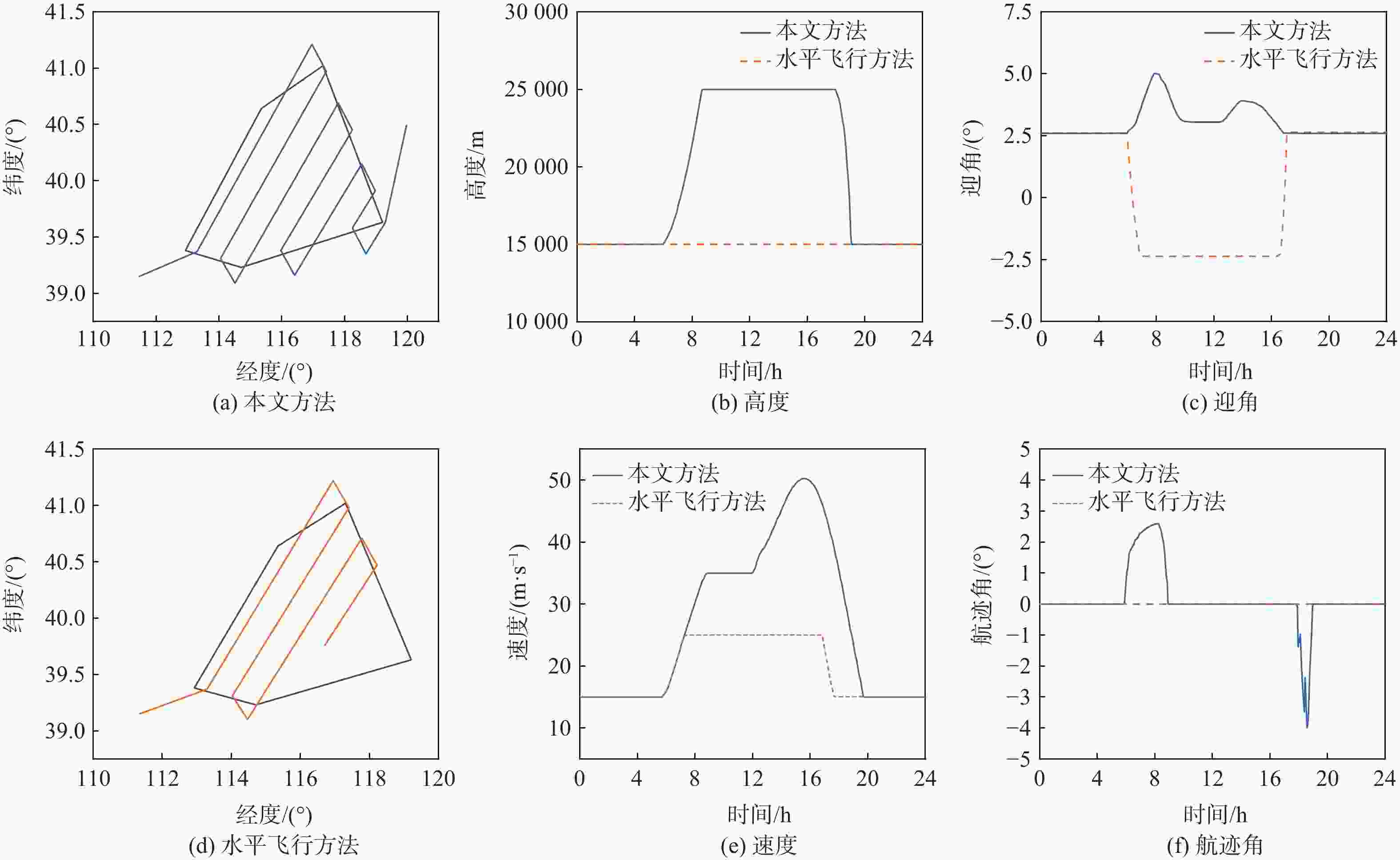
图 9 本文方法与水平飞行方法的比较
Figure 9. Comparison between the proposed method and horizontal flight method
表 1 太阳能无人机模型参数
Table 1. Parameters for solar-powered UAV model
参数 数值 参数 数值 结构质量/kg 53 储能电池质量/kg 16 翼展/m 22.5 翼面积/m2 25.3 太阳能电池面积/m2 20.24 太阳能电池效率 0.2 储能电池能量密度/(Wh·kg−1) 350 储能电池效率 0.9 最大功率点追踪效率 0.95 电机效率 0.9 螺旋桨效率 0.8 奥斯瓦尔德因子 0.9 航电设备功率/W 10 载荷功率/W 10  下载: 导出CSV
下载: 导出CSV
表 2 全机升阻力系数
Table 2. Lift and drag coefficients of UAV
$\alpha $/(°) ${C_L}$ ${C_D}$ $\alpha $/(°) ${C_L}$ ${C_D}$ −4 0.3077 0.0269 6 1.1876 0.0464 −2 0.4826 0.0301 8 1.3644 0.0519 0 0.6583 0.0335 10 1.5406 0.0586 2 0.8344 0.0372 12 1.6769 0.0652 4 1.0103 0.0414 14 1.6776 0.0569
下载: 导出CSV
表 3 太阳能辐照模型计算参数
Table 3. Calculation parameters for solar irradiation model
$ {G_{{\text{sc}}}} $/(W·m−2) $ {c_{\text{s}}} $ $ {S_{\text{s}}} $ $ {h_{\text{b}}} $/km $ {h_{\text{s}}} $/km $ {R_{{\text{eth}}}} $/km 1367 0.357 0.678 40 7 6356.8
下载: 导出CSV
表 4 算法验证结果
Table 4. Algorithm verification results
区域 改进$\max {P_{{\text{ave}}}}$/kW ${P_{{\text{ave}}}}$提升率/% 改进RCA 传统FLPMW 区域1 2.1249 2.0041 6.02 区域2 2.2280 1.9916 11.87 区域3 2.2432 2.0401 9.95
下载: 导出CSV
表 5 联合优化结果
Table 5. Joint optimization results
方法 $\max {P_{{\text{ave}}}}$/kW ${L_{{\text{tot}}}}$/km $ {T_{{\text{hmax}}}} $/h $ {T_{{\text{hmin}}}} $/h FLPMW 1.98 2438.95 8.46 11.46 改进RCA 2.21 2171.91 9.22 10.90
下载: 导出CSV
-
[1] 吴健发, 王宏伦, 黄宇. 大跨时空任务背景下的太阳能无人机任务规划技术研究进展[J]. 航空学报, 2020, 41(3): 623414.WU J F, WANG H L, HUANG Y. Research development of solar powered UAV mission planning technology in large-scale time and space spans[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(3): 623414(in Chinese). [2] ZHU X F, GUO Z, HOU Z X. Solar-powered airplanes: a historical perspective and future challenges[J]. Progress in Aerospace Sciences, 2014, 71: 36-53. doi: 10.1016/j.paerosci.2014.06.003 [3] KLESH A T, KABAMBA P T. Solar-powered aircraft: energy-optimal path planning and perpetual endurance[J]. Journal of Guidance, Control, and Dynamics, 2009, 32(4): 1320-1329. doi: 10.2514/1.40139 [4] SPANGELO S C, GILBERT E G. Power optimization of solar-powered aircraft with specified closed ground tracks[J]. Journal of Aircraft, 2013, 50(1): 232-238. doi: 10.2514/1.C031757 [5] WU J F, WANG H L, LI N, et al. Distributed trajectory optimization for multiple solar-powered UAVs target tracking in urban environment by adaptive grasshopper optimization algorithm[J]. Aerospace Science and Technology, 2017, 70: 497-510. doi: 10.1016/j.ast.2017.08.037 [6] WU J F, WANG H L, LI N, et al. Path planning for solar-powered UAV in urban environment[J]. Neurocomputing, 2018, 275: 2055-2065. doi: 10.1016/j.neucom.2017.10.037 [7] SACHS G, LENZ J, HOLZAPFEL F. Unlimited endurance performance of solar UAVs with minimal or zero electrical energy storage[C]//Proceedings of the AIAA Guidance, Navigation, and Control Conference. Reston: AIAA, 2009. [8] GAO X Z, HOU Z X, GUO Z, et al. Energy management strategy for solar-powered high-altitude long-endurance aircraft[J]. Energy Conversion and Management, 2013, 70: 20-30. doi: 10.1016/j.enconman.2013.01.007 [9] WANG S Q, MA D L, YANG M Q, et al. Flight strategy optimization for high-altitude long-endurance solar-powered aircraft based on Gauss pseudo-spectral method[J]. Chinese Journal of Aeronautics, 2019, 32(10): 2286-2298. doi: 10.1016/j.cja.2019.07.022 [10] HUANG Y, WANG H L, YAO P. Energy-optimal path planning for solar-powered UAV with tracking moving ground target[J]. Aerospace Science and Technology, 2016, 53: 241-251. doi: 10.1016/j.ast.2016.03.024 [11] WANG X Y, YANG Y P, WU D, et al. Mission-oriented 3D path planning for high-altitude long-endurance solar-powered UAVs with optimal energy management[J]. IEEE Access, 2020, 8: 227629-227641. doi: 10.1109/ACCESS.2020.3045934 [12] 杜楠楠, 陈建, 马奔, 等. 多太阳能无人机覆盖路径优化方法[J]. 航空学报, 2021, 42(6): 324476.DU N N, CHEN J, MA B, et al. Optimization method for coverage path planning of multi-solar powered UAVs[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(6): 324476(in Chinese). [13] 赵炜, 赵钱, 黄江流, 等. 临近空间太阳能无人机在现代战争中的应用[J]. 空天防御, 2020, 3(2): 85-90. doi: 10.3969/j.issn.2096-4641.2020.02.013ZHAO W, ZHAO Q, HUANG J L, et al. Application of near space solar powered UAV in modern war[J]. Air & Space Defense, 2020, 3(2): 85-90(in Chinese). doi: 10.3969/j.issn.2096-4641.2020.02.013 [14] BERGER C, WZOREK M, KVARNSTRÖM J, et al. Area coverage with heterogeneous UAVs using scan patterns[C]//Proceedings of the IEEE International Symposium on Safety, Security, and Rescue Robotics. Piscataway: IEEE Press, 2016: 342-349. [15] AZPÚRUA H, FREITAS G M, MACHARET D G, et al. Multi-robot coverage path planning using hexagonal segmentation for geophysical surveys[J]. Robotica, 2018, 36(8): 1144-1166. doi: 10.1017/S0263574718000292 [16] NAM L H, HUANG L, LI X J, et al. An approach for coverage path planning for UAVs[C]//Proceedings of the IEEE 14th International Workshop on Advanced Motion Control. Piscataway: IEEE Press, 2016: 411-416. [17] GAO C Q, KOU Y X, LI Z W, et al. Optimal multirobot coverage path planning: ideal-shaped spanning tree[J]. Mathematical Problems in Engineering, 2018, 2018(1): 3436429. [18] YUE W, JIANG Z. Path planning for UAV to collect sensors data based on spiral decomposition[J]. Procedia Computer Science, 2018, 131: 873-879. doi: 10.1016/j.procs.2018.04.291 [19] LI Y, CHEN H, JOO ER M, et al. Coverage path planning for UAVs based on enhanced exact cellular decomposition method[J]. Mechatronics, 2011, 21(5): 876-885. doi: 10.1016/j.mechatronics.2010.10.009 [20] TORRES M, PELTA D A, VERDEGAY J L, et al. Coverage path planning with unmanned aerial vehicles for 3D terrain reconstruction[J]. Expert Systems with Applications, 2016, 55: 441-451. doi: 10.1016/j.eswa.2016.02.007 [21] 王自亮, 罗德林, 吴顺祥. 凹多边形区域覆盖无人机航迹规划方法[J]. 航空兵器, 2019, 26(1): 95-100. doi: 10.12132/ISSN.1673-5048.2018.0068WANG Z L, LUO D L, WU S X. A UAV path planning method for concave polygonal area coverage[J]. Aero Weaponry, 2019, 26(1): 95-100(in Chinese). doi: 10.12132/ISSN.1673-5048.2018.0068 [22] 王红星, 马学娇, 张长森. 一种凹多边形区域的无人机覆盖路径规划算法[J]. 航空兵器, 2021, 28(6): 46-52. doi: 10.12132/ISSN.1673-5048.2021.0019WANG H X, MA X J, ZHANG C S. An algorithm of coverage path planning for UAV in concave polygon area[J]. Aero Weaponry, 2021, 28(6): 46-52(in Chinese). doi: 10.12132/ISSN.1673-5048.2021.0019 [23] HUANG W H. Optimal line-sweep-based decomposetions for coverage algorithms[C]//Proceedings of the IEEE International Conference on Robotics & Automation. Piscataway: IEEE Press, 2001. [24] 陈海, 王新民, 焦裕松, 等. 一种凸多边形区域的无人机覆盖航迹规划算法[J]. 航空学报, 2010, 31(9): 1802-1808.CHEN H, WANG X M, JIAO Y S, et al. An algorithm of coverage flight path planning for UAVs in convex polygon areas[J]. Acta Aeronautica et Astronautica Sinica, 2010, 31(9): 1802-1808(in Chinese). [25] 庞强伟, 胡永江, 李文广. 基于垂直区域宽度分解的无人机覆盖航迹规划[J]. 系统工程与电子技术, 2019, 41(11): 2550-2558.PANG Q W, HU Y J, LI W G. Uav Coverage Track planning based on vertical region width decomposition[J]. Systems Engineering and Electronics, 2019, 41(11): 2550-2558(in Chinese). [26] VASQUEZ GOMEZ J I, MELCHOR M M, HERRERA LOZADA J C. Optimal coverage path planning based on the rotating calipers algorithm[C]//Proceedings of the International Conference on Mechatronics, Electronics and Automotive Engineering. Piscataway: IEEE Press, 2017: 140-144. [27] RAO A V, BENSON D A, DARBY C, et al. Algorithm 902: GPOPS, a MATLAB software for solving multiple-phase optimal control problems using the gauss pseudospectral method[J]. ACM, 2010, 37(2): 1-39. [28] QINETI Q. Solar aircraft achieves longest unmanned flight[J]. Reinforced Plastics, 2010, 54(5): 9. doi: 10.1016/S0034-3617(10)70154-5 [29] HUANG Y, WANG H L, LI N, et al. Endurance estimate for solar-powered unmanned aerial vehicles[C]//Proceedings of the 9th International Conference on Intelligent Human-Machine Systems and Cybernetics. Piscataway: IEEE Press, 2017: 66-70. [30] 王宏伦, 黄宇. 太阳能无人机能量生产估计模型及应用[J]. 战术导弹技术, 2017(1): 9-16.WANG H L, HUANG Y. Energy production estima- tion model and application of solar powered UAV[J]. Tactical Missile Technology, 2017(1): 9-16(in Chinese). [31] ROMEO G, FRULLA G. HELIPLAT: aerodynamic and structural analysis of HAVE solar powered platform[C]//Proceedings of the 1st UAV Conference. Reston: AIAA, 2002. [32] 昌敏. 广纬度域驻留太阳能飞机设计及其动力学特性研究[D]. 西安: 西北工业大学, 2013.CHANG M. Design and dynamic characteristics of a solar aircraft residing in a wide latitude domain [D]. Xi’an: Northwestern Polytechnical University, 2013(in Chinese). [33] SHAMOS M L. Computational geometry[D]. New Haven : Yale University, 1978. -

 下载:
下载:











 点击查看大图
点击查看大图

计量
- 文章访问数: 114
- HTML全文浏览量: 27
- PDF下载量: 23
- 被引次数: 0
