



-
摘要:
针对多机动扩展目标跟踪问题,将交互式多模型的思想引入泊松多伯努利混合滤波(PMBM)算法中,提出了一种多模型的伽马高斯逆威夏特-泊松多伯努利混合滤波(MM-GGIW-PMBM)算法。该算法融合多种运动模型,通过模型的交互实现对机动扩展目标扩展状态和质心状态的混合估计预测;通过引入强跟踪滤波(STF)中的渐消因子修正预测之后GGIW分量中的协方差矩阵,防止发生跟踪模型失配的现象;在PMBM更新阶段扩展目标外形和质心估计完成的基础上,利用似然函数完成模型概率的更新。仿真实验结果表明:MM-GGIW-PMBM算法能够对多机动扩展目标的数量和状态进行有效的估计。
-
关键词:
- 泊松多伯努利混合滤波 /
- 伽马高斯逆威夏特 /
- 扩展目标跟踪 /
- 强跟踪滤波 /
- 交互式多模型
Abstract:To address the problem of multiple maneuvering extended target tracking, this paper introduces the concept of interactive multiple models into the Poisson multi-Bernoulli mixture filtering (PMBM) algorithm, and proposes a multi-model algorithm with Gamma Gaussian inverse Wishart and PMBM (MM-GGIW-PMBM). Firstly, the algorithm integrates multiple motion models and realizes the hybrid estimation and prediction of the extended state of the maneuvering target and the centroid state through the interaction of the models. Secondly, the covariance matrix in the predicted GGIW components is modified by introducing the fading factor into the strong tracking filter (STF) to prevent the tracking model mismatch. Finally, the target shape is expanded in the PMBM update stage based on the completion of centroid estimation, and the likelihood function is used to update the model probability. The simulation shows that the proposed algorithm can effectively estimate the number and state of multiple maneuvering extended targets.
-

图 1 MM-GGIW-PMBM算法下扩展目标运动轨迹及其估计轨迹
Figure 1. Trajectory of extended target and its estimated trajectory by MM-GGIW-PMBM algorithm

图 2 GGIW-PMBM算法下扩展目标运动轨迹及其估计轨迹
Figure 2. Trajectory of extended target and its estimated trajectory by GGIW-PMBM algorithm

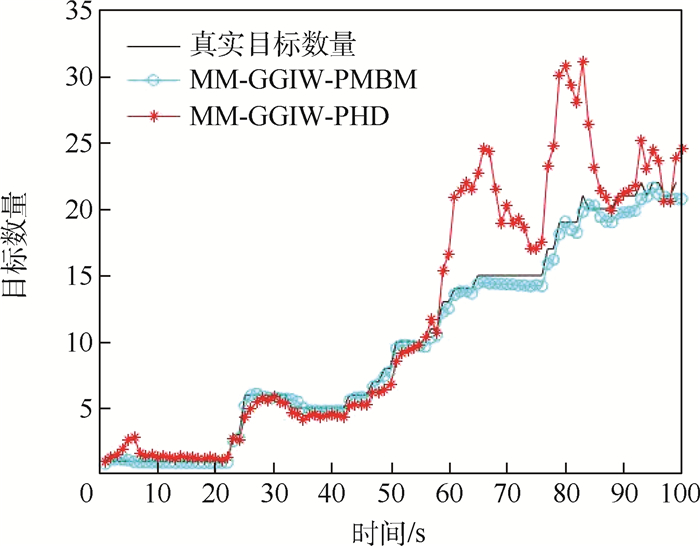
图 3 两种算法对目标数量的估计对比
Figure 3. Comparison of two algorithms for estimating target numbers

图 4 两种算法对目标数量的估计误差对比
Figure 4. Comparison of two algorithms for estimating error of target numbers

图 5 两种算法GOSPA距离估计误差对比
Figure 5. Comparison of GOSPA distance estimation errors between two algorithms

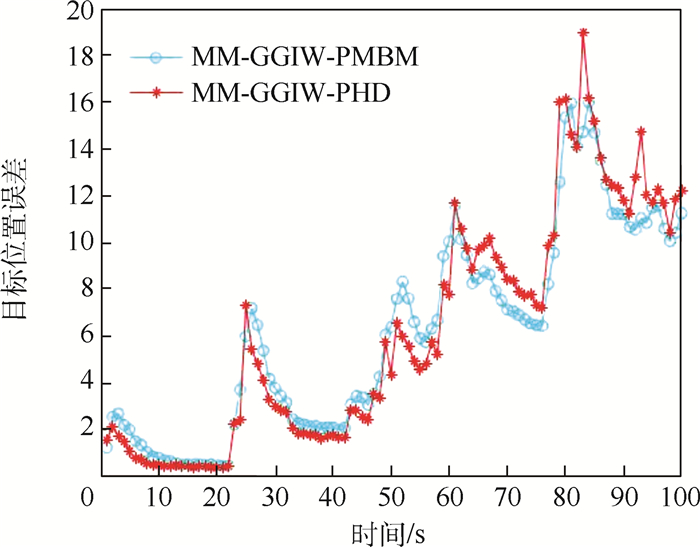
图 6 两种算法目标位置估计误差对比
Figure 6. Comparison of target location estimation errors between two algorithms

图 7 两种算法漏检目标数量估计对比
Figure 7. Comparison of estimating missed target numbers between two algorithms
-
[1] GRANSTRÖM K, BAUM M. Extended object tracking: Introduction, overview and applications[J]. Journal of Advances in Information Fusion, 2017, 12(2): 140-174. [2] MAHLER R. Multitarget Bayes filtering via first-order multitarget moments[J]. IEEE Transactions on Aerospace and Electronic Systems, 2003, 39(4): 1152-1178. doi: 10.1109/TAES.2003.1261119 [3] VO B N, MA W K. The Gaussian mixture probability hypothesis density filter[J]. IEEE Transactions on Signal Processing, 2006, 54(11): 4091-4104. doi: 10.1109/TSP.2006.881190 [4] CLARK D, VO B N. Convergence analysis of the Gaussian mixture PHD filter[J]. IEEE Transactions on Signal Processing, 2007, 55(4): 1204-1212. doi: 10.1109/TSP.2006.888886 [5] MAHLER R. PHD filters of higher order in target number[J]. IEEE Transactions on Aerospace and Electronic Systems, 2007, 43(4): 1523-1543. doi: 10.1109/TAES.2007.4441756 [6] PASHA S A, VO B N, TUAN H D. A Gaussian mixture PHD filter for jump Markov system models[J]. IEEE Transactions on Aerospace and Electronic Systems, 2009, 45(3): 919-936. doi: 10.1109/TAES.2009.5259174 [7] SHEN X, SONG Z, FAN H, et al. Particle filter implementation of CPHD filter for unknown clutter[C]//2017 6th International Conference on Electrical Engineering and Informatics. Pisca-taway: IEEE Press, 2017: 1-6. [8] VO B T, VO B N. Labeled random finite sets and multi-object conjugate priors[J]. IEEE Transactions on Signal Processing, 2013, 61(13): 3460-3475. doi: 10.1109/TSP.2013.2259822 [9] VO B T, VO B N. The labeled multi-Bernoulli filter[J]. IEEE Transactions on Signal Processing, 2014, 62(12): 3246-3260. doi: 10.1109/TSP.2014.2323064 [10] GRANSTRÖM K, FATEMI M, SVENSSON L. Poisson multi-Bernoulli mixture conjugate prior for multiple extended target filtering[J]. IEEE Transactions on Aerospace and Electronic Systems, 2020, 56(1): 208-225. doi: 10.1109/TAES.2019.2920220 [11] GRANSTRÖM K, ORGUNER U. On spawning and combination of extended/group targets modeled with random matrices[J]. IEEE Transactions on Signal Processing, 2013, 61(3): 678-692. doi: 10.1109/TSP.2012.2230171 [12] MAZOR E, AVERBUCH A, BAR-SHALOM Y, et al. Interacting multiple model methods in target tracking: A survey[J]. IEEE Transactions on Aerospace and Electronic Systems, 1998, 34(1): 103-123. doi: 10.1109/7.640267 [13] 甘林海, 刘进忙, 王刚, 等. 多模型GGIW-GLMB算法跟踪机动群目标[J]. 北京麻豆精品秘 国产传媒学报, 2018, 44(10): 2185-2192. doi: 10.13700/j.bh.1001-5965.2018.0053GAN L H, LIU J M, WANG G, et al. Multi model GGIW-GLMB algorithm for tracking maneuvering group targets[J]. Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(10): 2185-2192(in Chinese). doi: 10.13700/j.bh.1001-5965.2018.0053 [14] 汪云, 胡国平, 甘林海. 基于多模型GGIW-CPHD滤波的群目标跟踪算法[J]. 华中科技大学学报(自然科学版), 2017, 45(2): 89-94.WANG Y, HU G P, GAN L H. Group target tracking algorithm based on multi model GGIW-CPHD filtering[J]. Journal of Huazhong University of Science and Technology (Natural Science Edition), 2017, 45(2): 89-94(in Chinese). [15] RAHMATHULLAH A S, GARCÍA-FERNÁNDEZ Á F, SVENSSON L. Generalized optimal sub-pattern assignment metric[C]//2017 20th International Conference on Information Fusion. Piscataway: IEEE Press, 2017: 1-8. [16] GRANSTRÖM K, LUNDQUIST C, ORGUNER U. A Gaussian mixture PHD filter for extended target tracking[C]//2010 13th International Conference on Information Fusion. Piscataway: IEEE Press, 2010: 1-8. [17] YANG S, BAUM M, GRANSTRÖM K. Metrics for performance evaluation of elliptic extended object tracking methods[C]//2016 IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems. Piscataway: IEEE Press, 2016: 523-528. [18] GIVENS C R, SHORTT R M. A class of Wasserstein metrics for probability distributions[J]. Michigan Mathematical Journal, 1984, 31(2): 231-240. -

 下载:
下载:






 点击查看大图
点击查看大图

计量
- 文章访问数: 1075
- HTML全文浏览量: 294
- PDF下载量: 105
- 被引次数: 0
