



Modified sensorless control of PMSM based on super-twisting sliding mode auto disturbance rejection
-
摘要:
针对永磁同步电机矢量控制系统中无传感器控制策略的抗扰动动态性能不足的问题。对超螺旋滑模算法(STA)进行研究,提出一种改进超螺旋滑模自抗扰控制(ISTA-ADRC)算法,该算法在原有超螺旋滑模算法的基础上引入改进Sigmoid函数和线性项。相较于传统超螺旋滑模算法,所提算法具有更好的快速性和鲁棒性。将所提算法嵌入自抗扰控制技术中,提出以改进超螺旋滑模自抗扰为核心的无传感器控制策略,提升无传感器控制法的抗扰性能。仿真实验结果表明:所提算法相比于传统的PI、线性自抗扰(LADRC)和滑模自抗扰算法,具有响应速度快、抖振小、抗扰能力强、稳态性能好的优点。
Abstract:The dynamic performance of the sensorless control strategy in the vector control system of a permanent magnet synchronous motor is insufficient. Firstly, the super twisting sliding mode algorithm (STA) is studied, and super twisting sliding mode auto disturbance rejection control (STA-ADRC) algorithm is proposed, which introduces an improved Sigmoid function and linear term on the basis of the original super spiral sliding mode algorithm. Compared with the traditional super spiral sliding mode algorithm, the proposed algorithm has better rapidity and robustness. Secondly, a sensorless control strategy based on enhanced super twisting sliding mode auto disturbance rejection control is suggested to enhance the disturbance rejection performance of the sensorless control. According to the simulation results, the proposed algorithm has the following benefits over the conventional PI, liner auto disturbance rejection control (LADRC), and sliding mode auto disturbance rejection control: quick response time, minimal buffeting, robust disturbance immunity, and good steady-state performance.
-

图 1 传统一阶LADRC速度环控制结构
Figure 1. Structure of a traditional first-order LADRC speed loop control
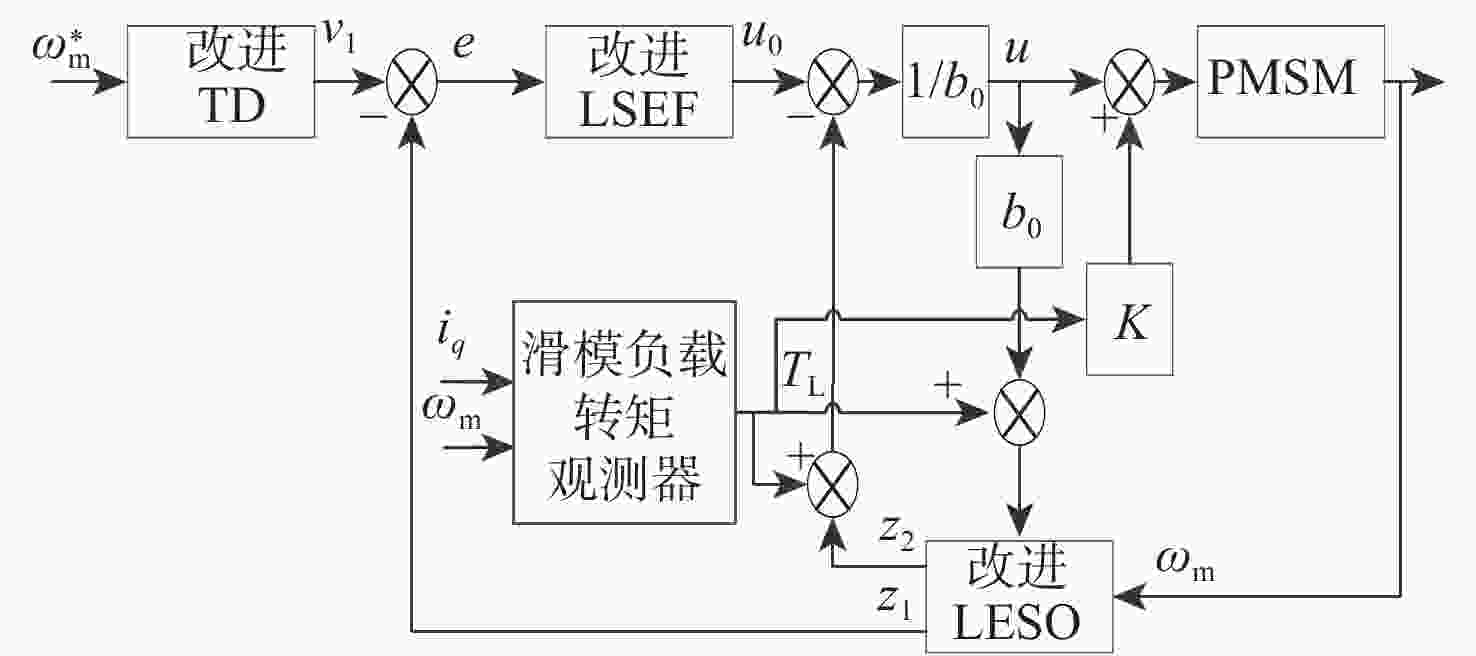
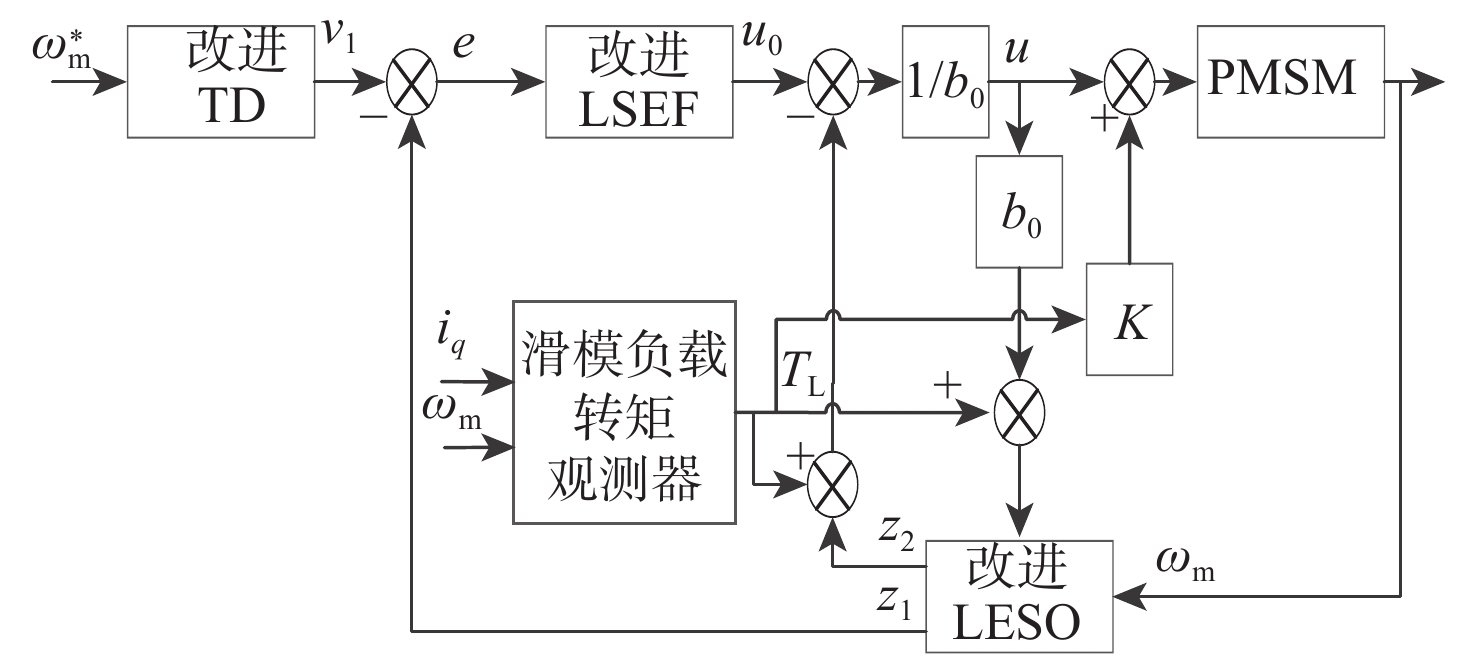
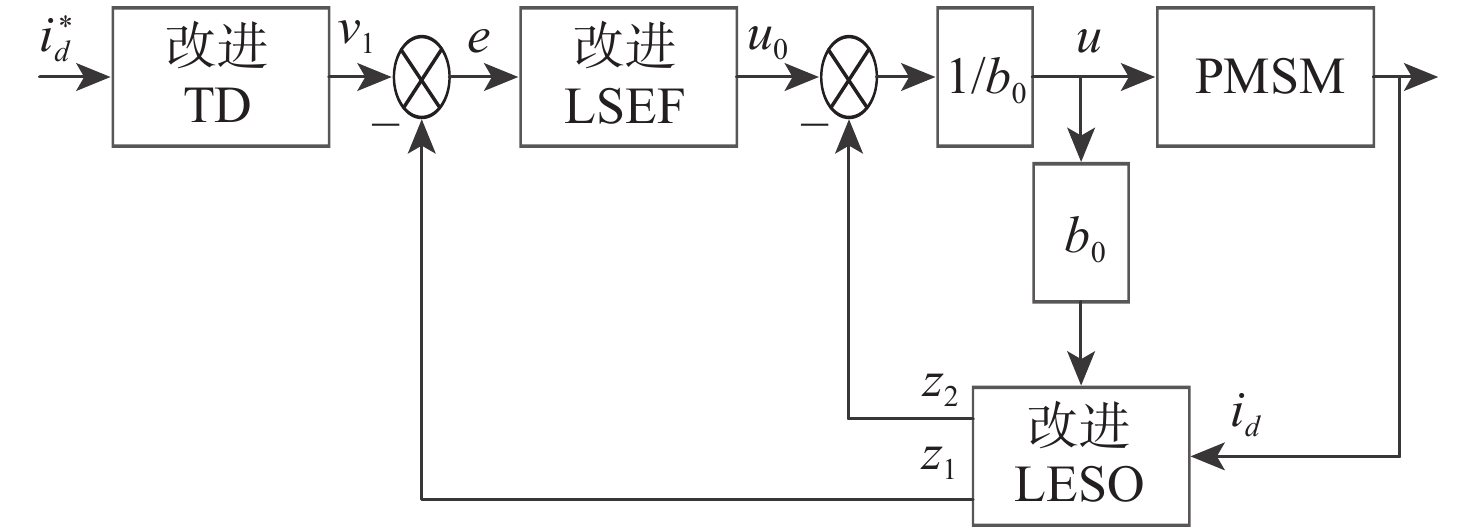
图 2 改进一阶ADRC控制的速度环结构
Figure 2. Structure of an improved first-order ADRC speed loop control
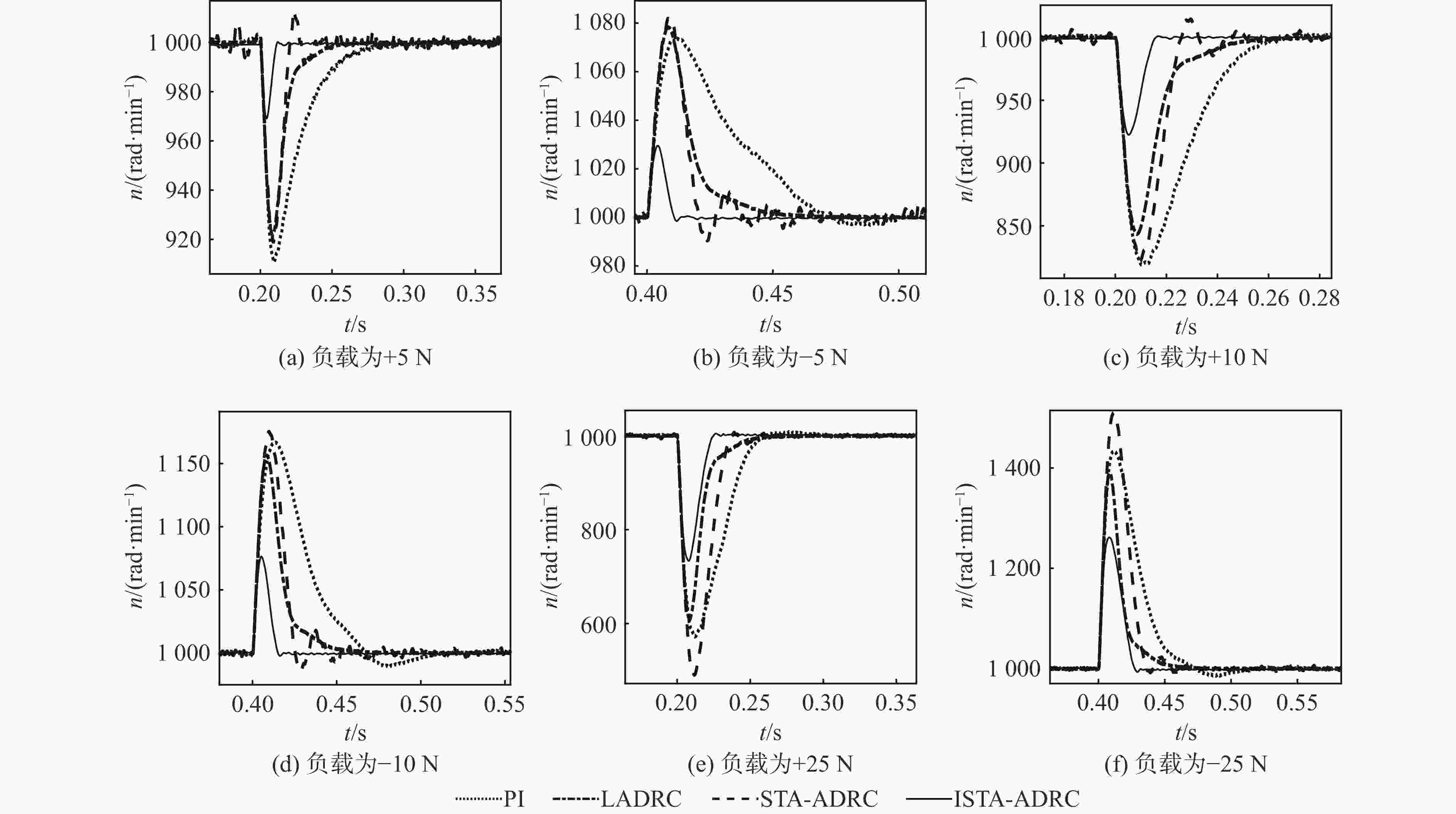
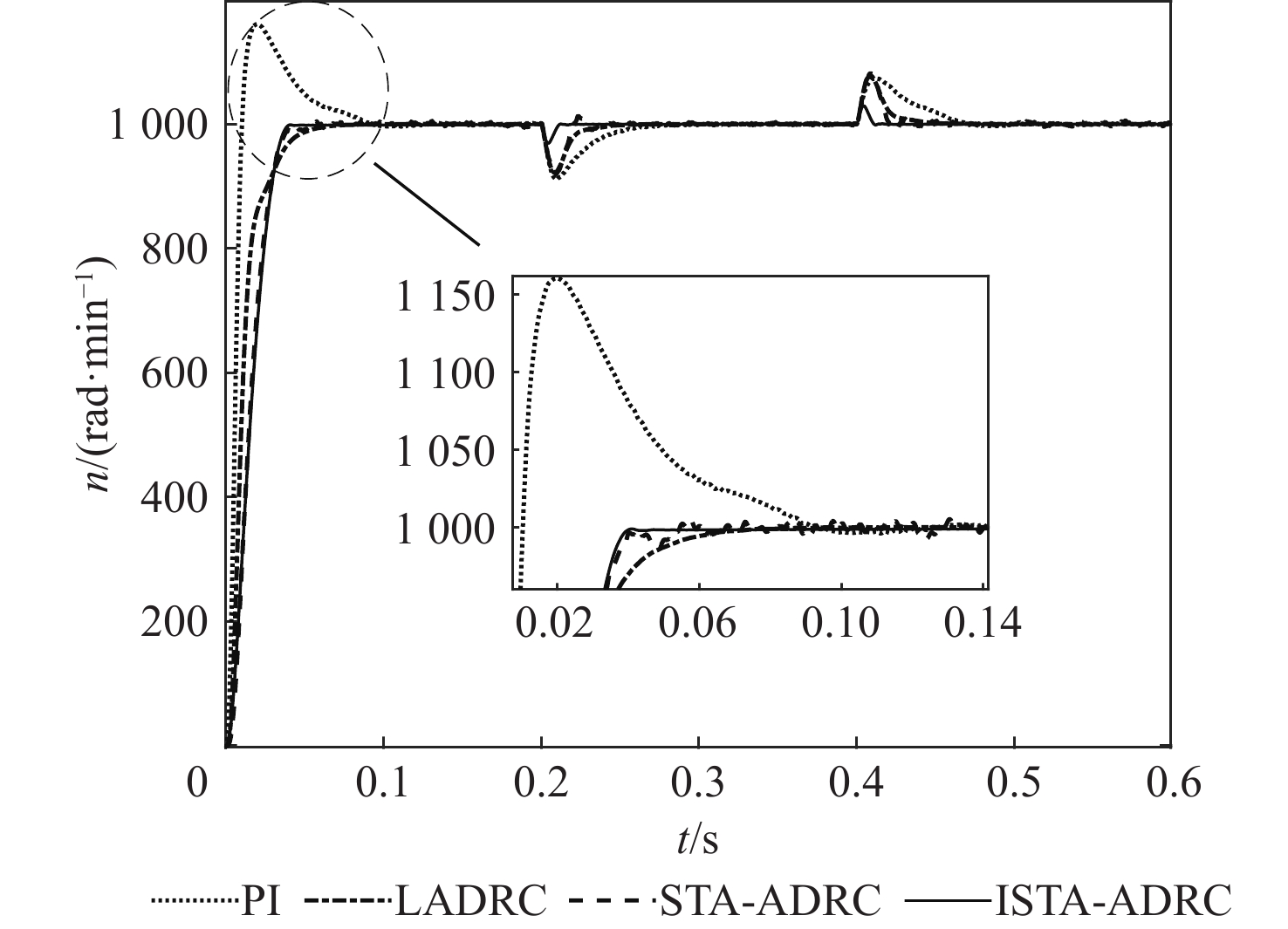
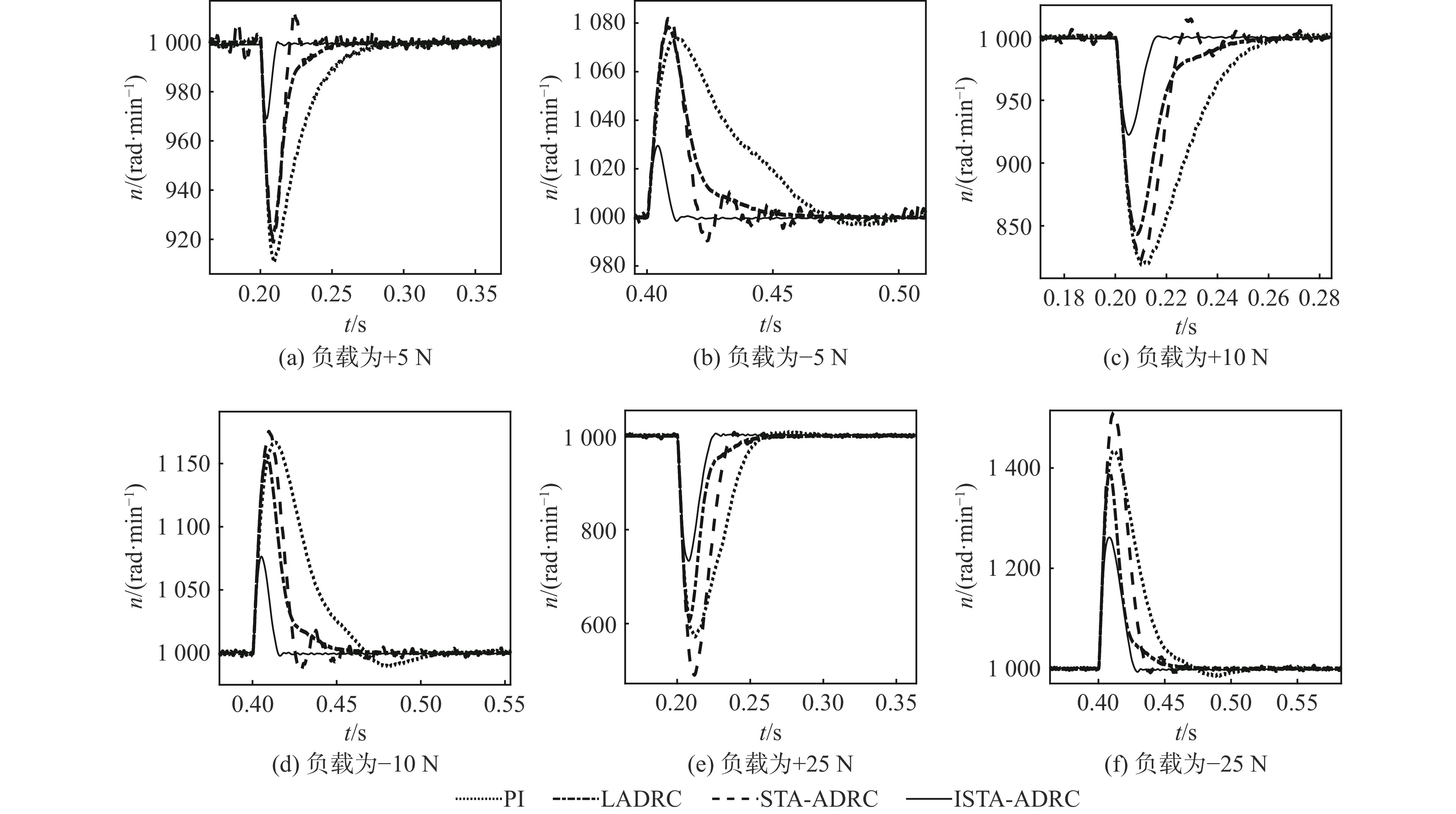
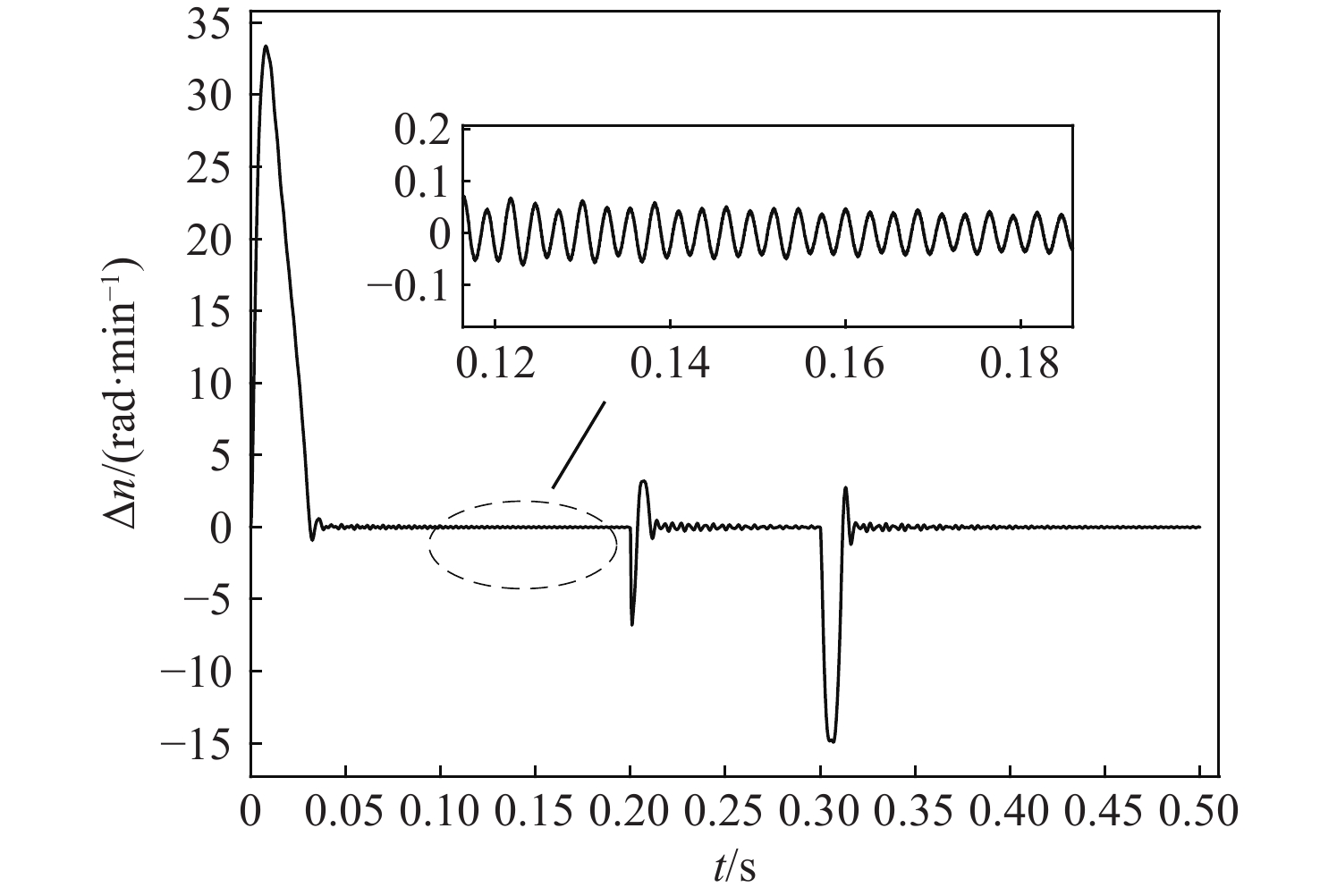
图 7 突增和突降负载的转速抗扰性能曲线
Figure 7. Speed resilience curves under sudden load increase and decrease
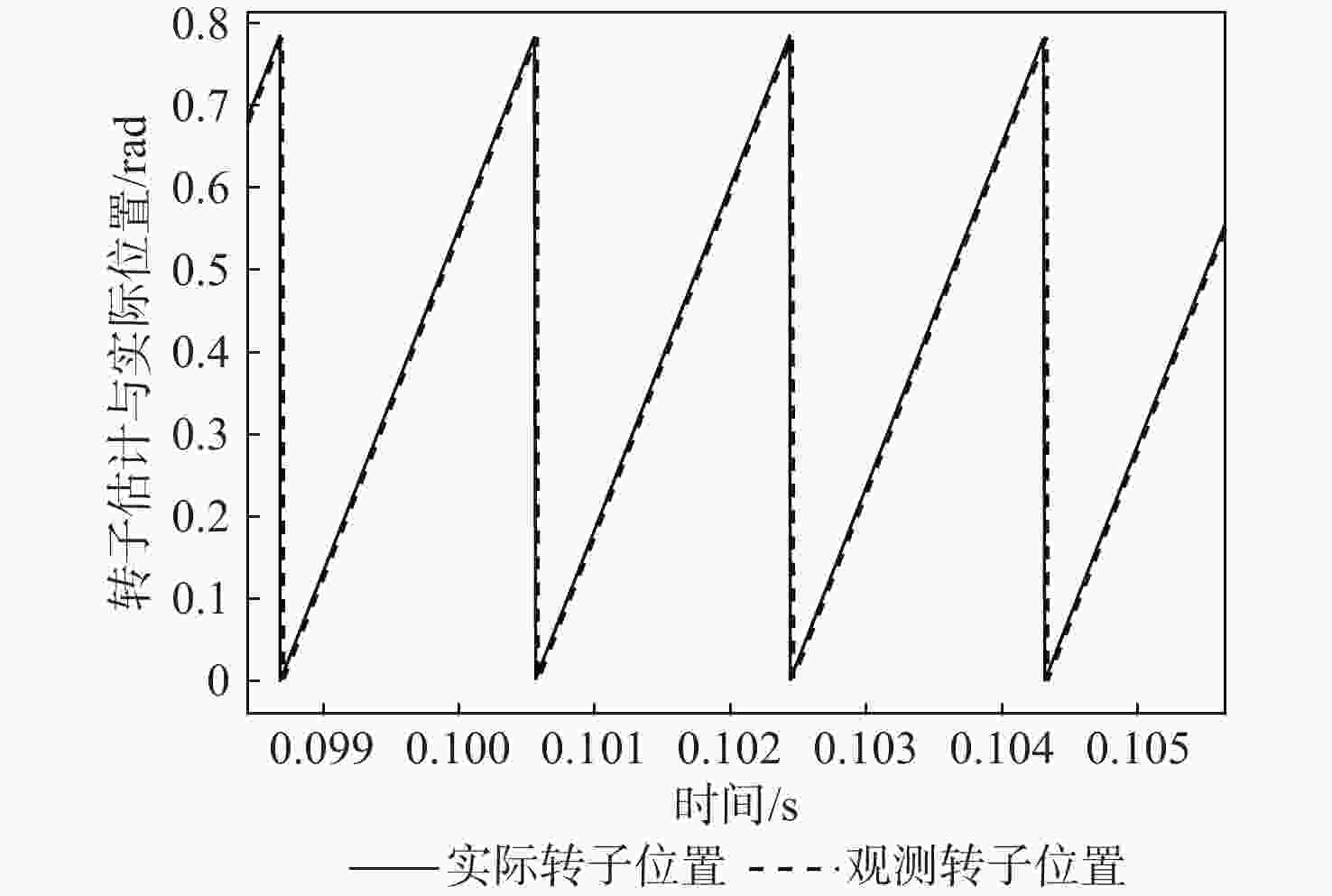
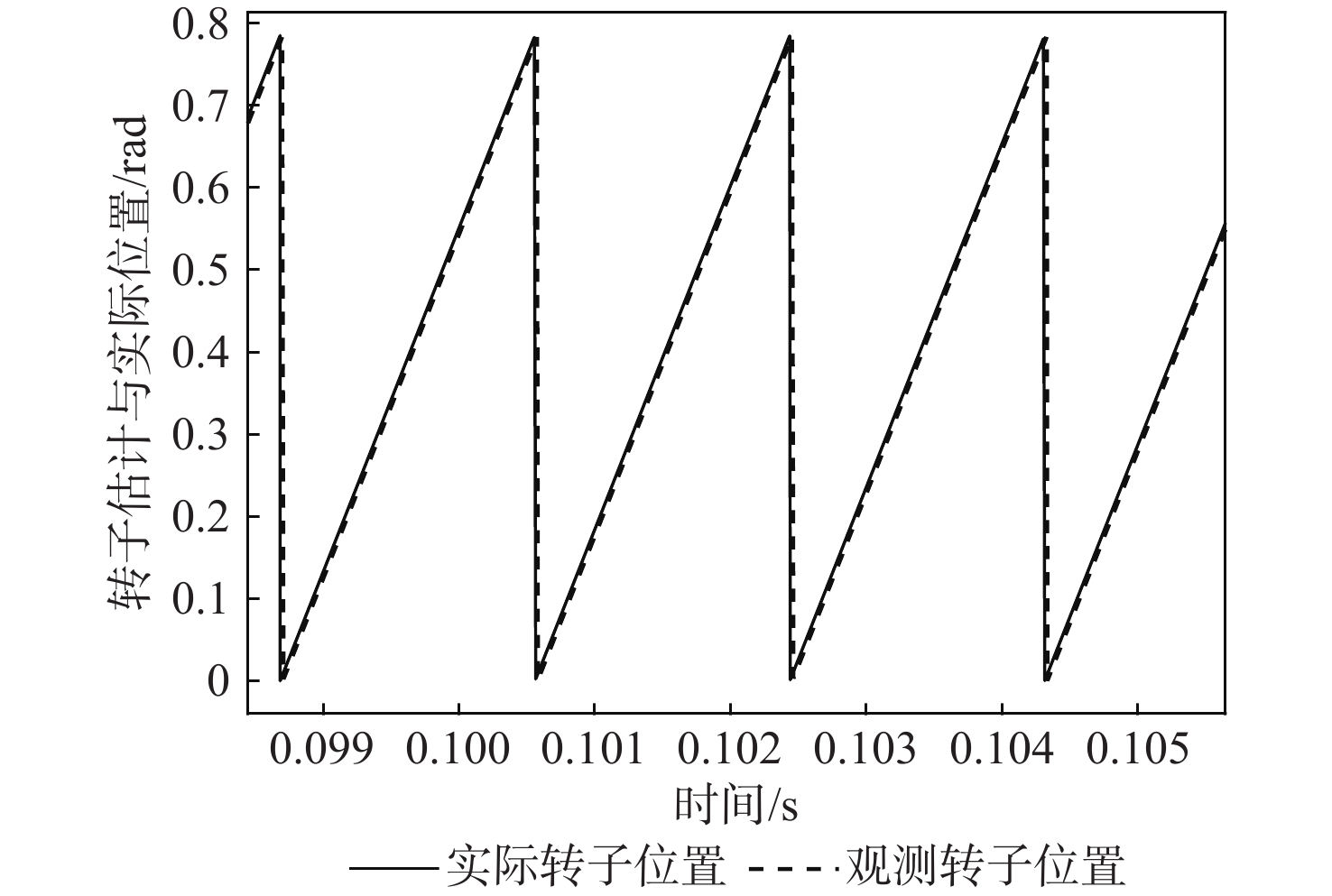
图 10 LESO估计转子位置与实际位置波形对比
Figure 10. Comparison of estimated rotor position and actual position waveforms with LESO
表 1 PMSM参数
Table 1. PMSM parameters
参数 数值 转动惯量J/( kg·m2) 0.003 永磁体磁链φf/Wb 0.175 d-q轴电感Ldq/mh 8.500 定子电阻Rs/Ω 2.875 极对数pn 4.000 阻尼系数B/ (N·m·s) 0.008  下载: 导出CSV
下载: 导出CSV
-
[1] 张硕, 李雪荣, 崔星, 等. 永磁同步电机参数扰动抑制方法[J]. 北京理工大学学报, 2022, 42(2): 184-191.ZHANG S, LI X R, CUI X, et al. Parameter disturbance suppression method of PMSM[J]. Transactions of Beijing Institute of Technology, 2022, 42(2): 184-191(in Chinese). [2] WANG H Z, XU S, HU H S. PID controller for PMSM speed control based on improved quantum genetic algorithm optimization[J]. IEEE Access, 2023, 11: 61091-61102. doi: 10.1109/ACCESS.2023.3284971 [3] GAO P, ZHANG G M, OUYANG H M, et al. An adaptive super twisting nonlinear fractional order PID sliding mode control of permanent magnet synchronous motor speed regulation system based on extended state observer[J]. IEEE Access, 2020, 8: 53498-53510. doi: 10.1109/ACCESS.2020.2980390 [4] PINDORIYA R M, TEJAN K V, RAJPUROHIT B S. Speed control of sensorless PMSM drive using adaptive current control prediction technique[J]. Electrical Engineering, 2023, 105(2): 1209-1221. doi: 10.1007/s00202-022-01725-y [5] LIU G, CHEN B D, WANG K, et al. Selective current harmonic suppression for high-speed PMSM based on high-precision harmonic detection method[J]. IEEE Transactions on Industrial Informatics, 2019, 15(6): 3457-3468. doi: 10.1109/TII.2018.2873652 [6] XIE F, HONG W J, QIU C M. Speed fluctuation suppression of PMSM using active disturbance rejection and feedback compensation control[J]. IET Electric Power Applications, 2021, 15(8): 1056-1067. doi: 10.1049/elp2.12079 [7] 王志福, 田昊, 黄丽敏, 等. 基于卡尔曼观测器的电机模拟器接口电流自抗扰无差拍预测控制算法[J]. 北京理工大学学报, 2023, 43(9): 912-925.WANG Z F, TIAN H, HUANG L M, et al. Kalman observer-based active disturbance rejection dead-beat predictive control algorithm for electric machine emulator interface current[J]. Transactions of Beijing Institute of Technology, 2023, 43(9): 912-925(in Chinese). [8] FU X H, GU S D, HE H, et al Compensation and rejection of cogging torque of PMSM based on novel internal model observer in series with extended state observer[J]. Proceedings of the Chinese Society of Electrical Engineering, 2022, 42(23): 8729-8739. [9] SHEN H Y, WU X Z, WANG, H F, et al. Suppression of third harmonic caused by SPWM for a nine-phase open-end winding permanent magnet synchronous motor[J]. Proceedings of the Chinese Society of Electrical Engineering, 2023, 43(5): 1992-2000. [10] 康尔良, 吴炳道, 禹聪. 基于LADRC控制的永磁同步电机无位置传感器研究[J]. 电机与控制学报, 2023, 27(2): 69-78.KANG E L, WU B D, YU C. Research on sensorless of permanent magnet synchronous motor based on LADRC control[J]. Electric Machines and Control, 2023, 27(2): 69-78(in Chinese). [11] 杜海明, 高函, 胡智宏, 等. 永磁同步电机超螺旋滑模自抗扰调速系统设计[J]. 重庆理工大学学报(自然科学), 2022, 36(10): 216-222.DU H M, GAO H, HU Z H, et al. Design of the active disturbance rejection speed regulation system of super-twisting sliding mode for permanent magnet synchronous motors[J]. Journal of Chongqing University of Technology (Natural Science), 2022, 36(10): 216-222(in Chinese). [12] 邱凌烽, 杨凯, 杨帆, 等. 基于改进重复自抗扰控制的永磁同步电机谐波抑制[J]. 组合机床与自动化加工技术, 2023(1): 1-5.QIU L F, YANG K, YANG F, et al. Harmonic suppression of permanent magnet synchronous motor based on revised repetitive-auto disturbance rejection control[J]. Modular Machine Tool & Automatic Manufacturing Technique, 2023(1): 1-5(in Chinese). [13] GAO Z Q. Scaling and bandwidth-parameterization based controller tuning[C]//Proceedings of the American Control Conference. Piscataway: IEEE Press, 2003: 4989-4996. [14] 宋昱霖, 李洪文, 邓永停. 永磁同步电机快速超螺旋滑模控制[J]. 控制工程, 2023, 30(1): 62-69.SONG Y L, LI H W, DENG Y T. Fast super twisting sliding mode control of permanent magnet synchronous motor[J]. Control Engineering of China, 2023, 30(1): 62-69(in Chinese). [15] LIU L, JIN D S, SI J W, et al. A novel nonsingular fast terminal sliding mode observer combining I-F method for wide-speed sensorless control of PMSM drives[J]. IET Power Electronics, 2023, 16(5): 843-855. doi: 10.1049/pel2.12427 [16] 程勇, 李思卿, 李森豪. 永磁同步电机干扰观测复合滑模控制技术[J]. 电机与控制应用, 2023, 50(3): 39-46.CHENG Y, LI S Q, LI S H. Compound sliding mode control technology of permanent magnet synchronous motor based on disturbance observation[J]. Electric Machines & Control Application, 2023, 50(3): 39-46(in Chinese). -

 下载:
下载:

 点击查看大图
点击查看大图

计量
- 文章访问数: 46
- HTML全文浏览量: 13
- PDF下载量: 3
- 被引次数: 0
