



-
摘要:
针对现有方法对舰船航迹尤其是对具有点位稀疏、灵活机动特征的军用舰船进行预测时,航迹特征提取不完整、预测准确性与可靠性不理想的情况,综合考虑航迹的多维度特性、航迹间关联特征及舰船海上航行海图约束(NCC)等,基于船舶自动识别系统(AIS)数据提出一种改进的长短期记忆(LSTM)人工神经网络舰船位置预测方法。针对军用舰船航迹特点,预测时将历史航迹通过三次样条插值的方法生成等间隔点位数据;通过航行区域地图栅格化处理,定义可通航栅格,建立海图约束来提升预测效果。基于LSTM设计网络时,通过设置自定义损失函数、预测点位进行栅格匹配等方法将海图约束融入模型训练和预测过程。基于南海海域AIS数据的仿真实验结果表明:所构建的网络可以有效地预测舰船航迹,尤其是对于具有高度机动性的军用舰船。与传统预测方法相比,所提方法在预测准确性和预测可靠性2个方面均有所改善。
Abstract:To address the issues of insufficient trajectory feature extraction, low prediction accuracy, and stability in existing methods for ship trajectory prediction, especially for military ships with sparse points and flexible maneuvering characteristics, this paper proposed an improved long short-term memory (LSTM) artificial neural network ship position prediction method. This approach was based on automatic identification system (AIS) data, considering the multi-dimensional features of the trajectory, inter-trajectory correlation features, and nautical chart constraints (NCC) for ships sailing at sea. For military ship trajectories, historical trajectories were interpolated by cubic spline interpolation to generate equidistant point data for prediction. The navigation area map was rasterized, with navigable grids defined to establish map constraints and improve prediction accuracy. Finally, when designing the LSTM-based network, chart constraints were integrated into the model training and prediction process by using a custom loss function, grid matching for predicted points, and other methods. Simulation results based on AIS data from the South China Sea show that the proposed network can effectively predict ship trajectories, especially for military ships with high maneuverability. The proposed method outperforms traditional prediction methods in both prediction accuracy and stability.
-

图 5 南海海域可通航环境分布
Figure 5. Distribution of navigable environment in the South China Sea
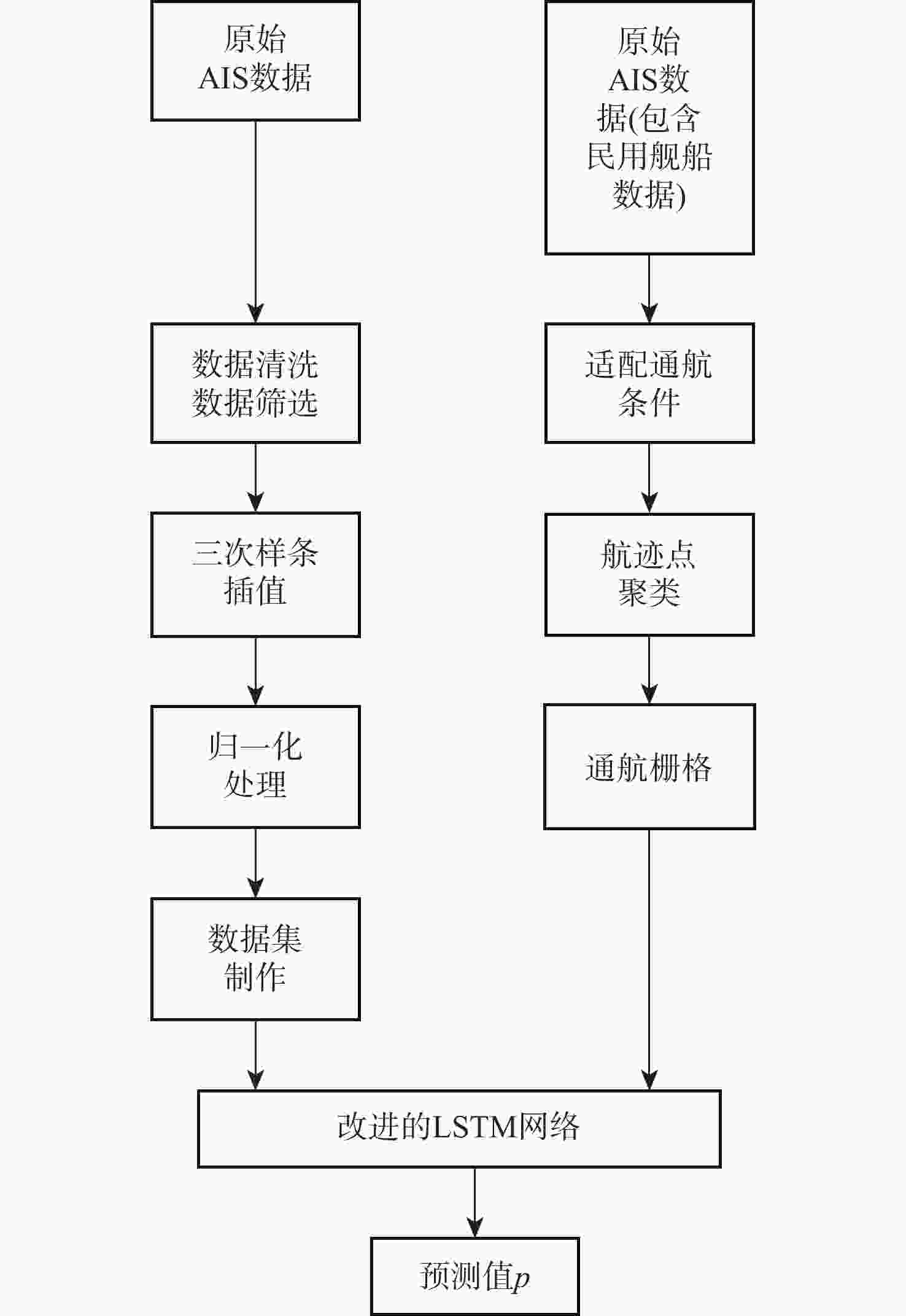
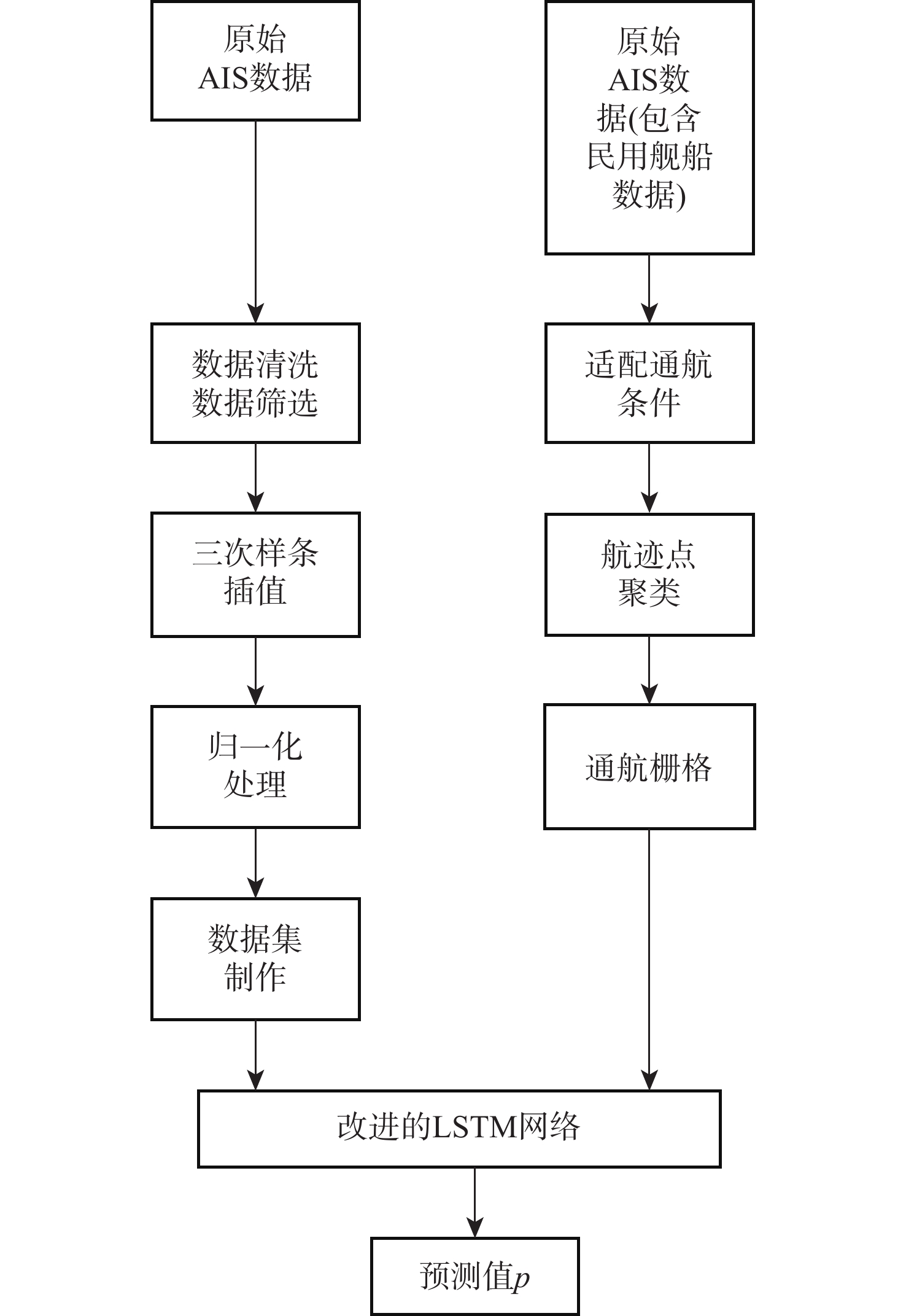
图 6 基于LSTM和海图约束的舰船航迹预测模型
Figure 6. Ship trajectory prediction model based on LSTM and nautical chart constraints
表 1 网络参数设置
Table 1. Network parameter settings
参数 数值 隐藏层节点数 108 训练轮数 200 批大小 64 Dropout 0.3 最小学习率 0.001  下载: 导出CSV
下载: 导出CSV
表 2 不同方法结果对比
Table 2. Comparison of results of different methods
对比参数 方法 经度/(°) 维度/(°) 航速/(m·s−1) 航向/(°) 点位距离/km MSE BP 0.0357 0.0193 0.0949 78.7890 637.3890 LSTM 0.0099 0.0012 0.0972 61.2626 113.7072 本文方法 0.0005 0.0007 0.0851 34.1310 13.5272 最大误差 BP 0.2571 0.2827 0.9429 55.8103 35.8939 LSTM 0.1559 0.0657 0.9872 62.2083 17.0231 本文方法 0.1515 0.0242 0.7280 32.0447 18.4168 最小误差 BP 0.0294 0.0005 0.0005 0.0226 10.9806 LSTM 0.0336 0.0004 0.0006 0.0318 6.8273 本文方法 0.0001 0.0001 0.0005 0.0135 0.5031 平均误差 BP 0.1811 0.1228 0.1119 4.9629 23.9867 LSTM 0.0980 0.0123 0.1066 4.0758 10.5349 本文方法 0.0133 0.0082 0.0887 3.1775 2.7426
下载: 导出CSV
-
[1] 徐铁, 蔡奉君, 胡勤友, 等. 基于卡尔曼滤波算法船舶 AIS 轨迹估计研究[J]. 现代电子技术, 2014, 37(5): 1-6.XU T, CAI F J, HU Q Y, et al. Ship trajectory prediction based on Kalman filter algorithm[J]. Modern Electronics Technique, 2014, 37(5): 1-6(in Chinese). [2] 成光, 刘卫东, 魏尚俊, 等. 基于卡尔曼滤波的目标估计和预测方法研究[J]. 计算机仿真, 2006(1): 355-362.CHENG G, LIU W D, WEI S J, et al. Research on target estimation and prediction method based on Kalman Filter[J]. Computer Simulation, 2006(1): 355-362(in Chinese). [3] WAN E A, VAN DER MERWE R. The unscented Kalman filter for nonlinear estimation[C]//Proceedings of the IEEE Adaptive Systems for Signal Processing, Communications, and Control Symposium. Piscataway: IEEE Press, 2000: 153-158. [4] 张蕴绮, 郭发勇, 朱梓清, 等. 改进的多特征粒子滤波目标跟踪算法研究[J]. 计算机测量与控制, 2023, 31(12): 106-113.ZHANG Y Q, GUO F Y, ZHU Z Q, et al. Research on improved multi feature particle filter target tracking algorithm[J]. Computer Measurement and Control, 2023, 31(12): 106-113(in Chinese). [5] ARULAMPALAM M S, MASKELL S, GORDON N, et al. A tutorial on particle filters for online nonlinear/non-Gaussian Bayesian tracking[J]. IEEE Transactions on Signal Processing, 2002, 50(2): 174-188. doi: 10.1109/78.978374 [6] 李鹏飞, 喻建平, 李良群, 等. 基于模糊自适应α-β滤波的机动目标跟踪测[J]. 系统工程与电子技术, 2008(11): 135-142.LI P F, YU J P, LI L Q, et al. Maneuvering target tracking measurement based on fuzzy adaptive α-β filtering[J]. System Engineering and Electronics, 2008(11): 135-142(in Chinese). [7] 孙红, 陈锁. 一种聚类隐马尔可夫模型的时空轨迹预测算法[J]. 小型微型计算机系统, 2019, 40(3): 35-41.SUN H, CHEN S. A spatiotemporal trajectory prediction algorithm based on clustering hidden Markov model[J]. Mini-Micro Systems, 2019, 40(3): 35-41(in Chinese). [8] 徐婷婷, 柳晓鸣, 杨鑫. 基于BP神经网络的船舶航迹实时预测[J]. 大连海事大学学报, 2012, 38(1): 9-11.XU T T, LIU X M, YANG X. BP neural network-based ship track real-time prediction[J]. Journal of Dalian Maritime University, 2012, 38(1): 9-11(in Chinese). [9] 甄荣, 金永兴, 胡勤友, 等. 基于AIS信息和BP神经网络的船舶航行行为预测[J]. 中国航海, 2017, 40(2): 6-10.ZHEN R, JIN Y X, HU Q Y, et al. Vessel behavior prediction based on AIS data and BP neural network[J]. Navigation of China, 2017, 40(2): 6-10(in Chinese). [10] HOCHREITER S, SCHMIDHUBER J. Long short-term memory[J]. Neural Computation, 1997, 9(8): 1735-1780. doi: 10.1162/neco.1997.9.8.1735 [11] 郝延彪, 万浦波, 王文博. 基于时空特征融合的舰船航迹预测方法[J]. 海军航空工程学院学报, 2021, 36(2): 191-198.HAO Y B, WAN P B, WANG W B. A ship track prediction method based on spatial-temporal feature fusion[J]. Journal of Naval Aeronautical and Astronautical University, 2021, 36(2): 191-198(in Chinese). [12] 蒋通, 崔良中, 刘立国, 等. 基于聚类分析和Att-Bi-LSTM的舰船航迹预测方法[J]. 计算机仿真, 2022, 39(8): 1-5.JIANG T, CUI L Z, LIU L G, et al. The method of ship track prediction based on cluster analysis and att-Bi-LSTM[J]. Computer Simulation, 2022, 39(8): 1-5(in Chinese). [13] 张黎翔, 朱怡安, 陆伟, 等. 基于AIS数据的船舶轨迹修复方法研究[J]. 西北工业大学学报, 2021, 39(1): 119-125.ZHANG L X, ZHU Y A , LU W, et al. A detection and restoration approach for vessel trajectory anomalies based on AIS[J]. Journal of Northwestern Polytechnical University, 2021, 39(1): 119-125(in Chinese). [14] SANDER J, ESTER M, KRIEGEL H P, et al. Density-based clustering in spatial databases: the algorithm GDBSCAN and its applications[J]. Data Mining and Knowledge Discovery, 1998, 2(2): 169-194. doi: 10.1023/A:1009745219419 [15] 石浩, 乔继潘, 季盛. 一种基于AIS数据的船舶航线自动规划方法[J]. 上海船舶运输科学研究所学报, 2021, 44(1): 25-30.SHI H, QIAO J P, JI S. An automatic navigation route planning for ships based on AIS data[J]. Journal of Shanghai Ship and Shipping Research Institute, 2021, 44(1): 25-30(in Chinese). [16] 权波, 杨博辰, 胡可奇, 等. 基于LSTM的船舶航迹预测模型[J]. 计算机科学, 2018, 45(S2): 126-131.QUAN B, YANG B C, HU K Q, et al. Ship track prediction model based on LSTM[J]. Computer Science, 2018, 45(S2): 126-131(in Chinese). -

 下载:
下载:







 点击查看大图
点击查看大图

计量
- 文章访问数: 315
- HTML全文浏览量: 69
- PDF下载量: 4
- 被引次数: 0
