



Non-cooperative automatic docking strategy of propellant umbilical connector for launch vehicle under fluctuating wind load
-
摘要:
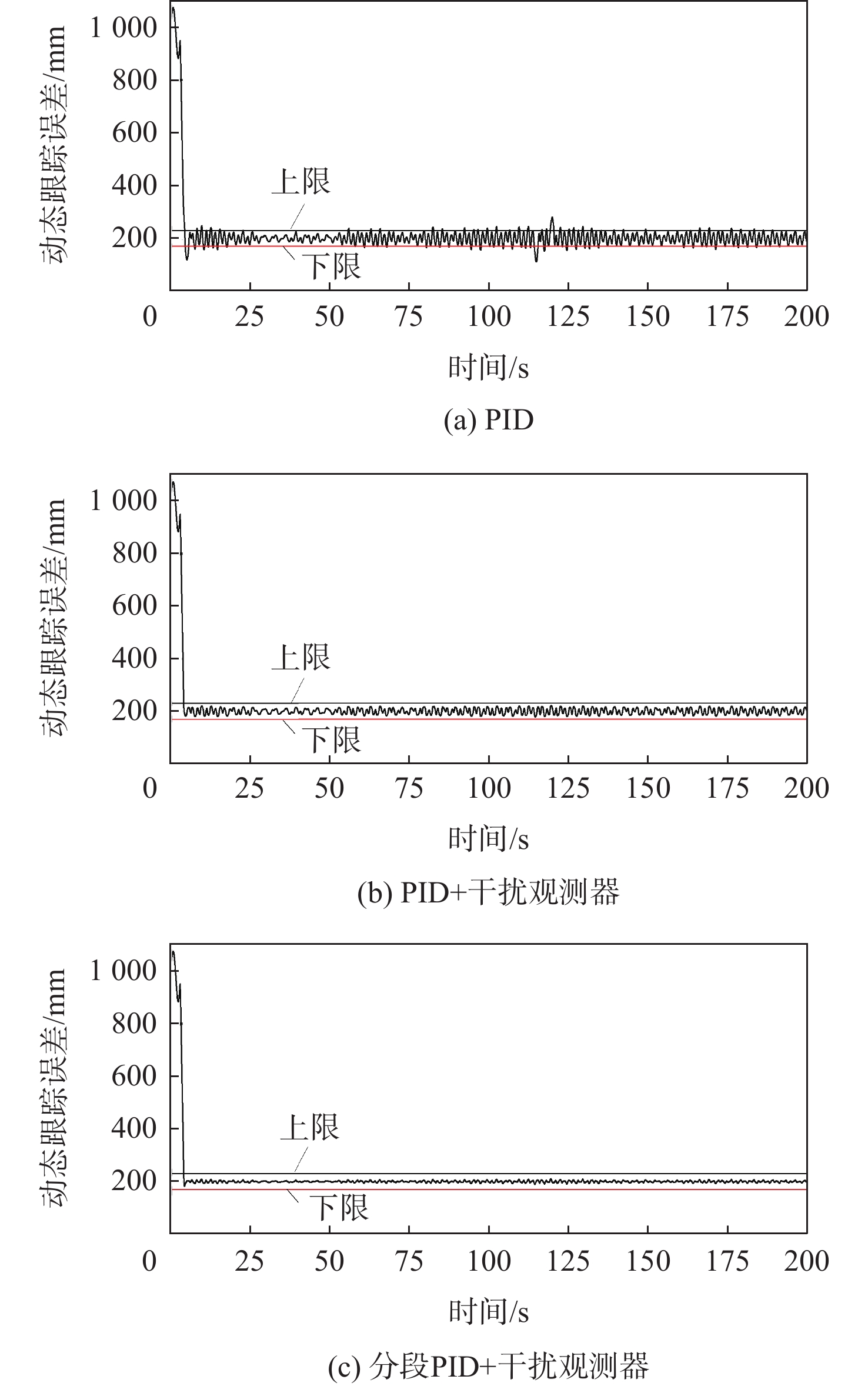
为解决运载火箭推进剂连接器在脉动风载激励干扰下与箭上接口的动态非合作自动对接问题,提高自动对接系统鲁棒性及响应速度。分析连接器自动对接任务剖面,制定了由检测、控制、位姿调整单元等组成的技术路线;分析脐带臂风载激励响应特性,获得了平均风速分别为10 m/s、15 m/s、20 m/s脉动风载激励下脐带臂的摆动情况;通过自动对接仿真模型开展常规PID、PID+干扰观测器、分段PID+干扰观测器控制策略仿真对比分析,搭建自动对接联合试验系统,进行控制策略验证,成功完成了自动对接全流程试验。结果表明:分段PID+干扰观测器控制策略能有效降低脉动风载激励下脐带臂摆动对自动对接的干扰影响,跟踪性能改善效果明显,对接可靠,各工况下对接跟踪误差均在±38 mm以内,完成对接时间不超过3 min。
Abstract:To address the challenge of dynamic non-cooperative automatic docking between the umbilical connector and the onboard interface of a launch vehicle under fluctuating wind load disturbances, and to enhance the robustness and response speed of the docking system, this paper first analyzed the workflow of the automatic docking task and proposes a technical scheme composed of a detection module, a control module, and a pose adjustment module. Second, the wind-induced response characteristics of the umbilical arm were analyzed, and its swing behavior under average wind speeds of 10, 15, and 20 m/s was obtained. Finally, a comparative simulation analysis was conducted using conventional PID, PID with disturbance observer, and piecewise PID with disturbance observer control strategies with a co-simulation model. An integrated experimental system for automatic docking was developed to verify the effectiveness of the control strategies. Full-process docking experiments were completed. The results show that the piecewise PID combined with a disturbance observer effectively reduces the impact of umbilical arm swing under fluctuating wind loads, significantly improves tracking performance and docking reliability, maintains tracking errors within ±38 mm, and achieves docking within 3 min under various operation conditions.
-
Key words:
- automatic docking /
- non-cooperative /
- umbilical connector /
- docking strategy /
- launch vehicle
-
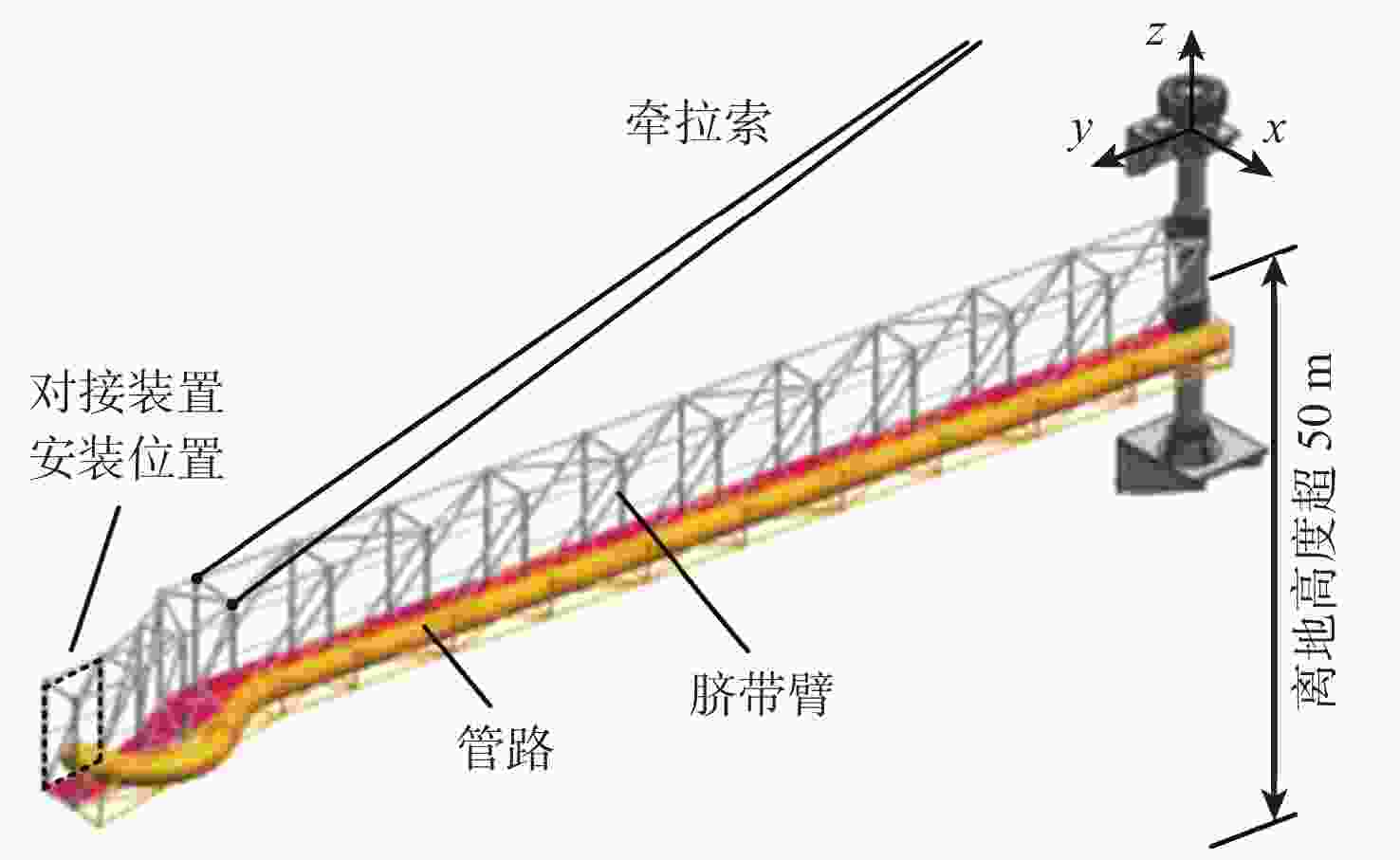
图 2 脐带臂模块(含管路、对接装置等)示意图
Figure 2. Umbilical arm module (including pipeline and docking device) diagram
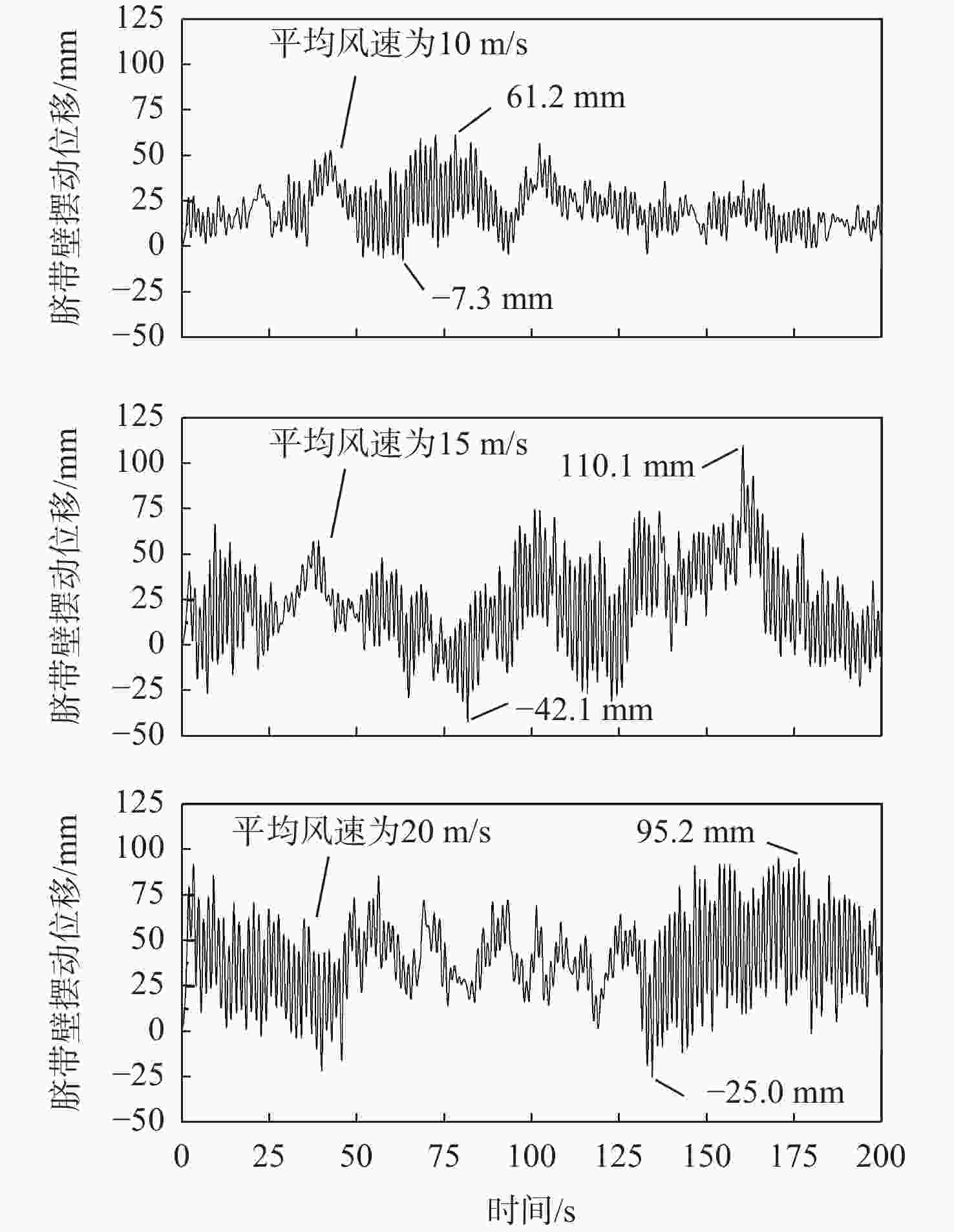
图 3 顺风向脉动风载激励下脐带臂摆动位移时程片段
Figure 3. Displacement response of umbilical arm under fluctuating wind load in downwind direction
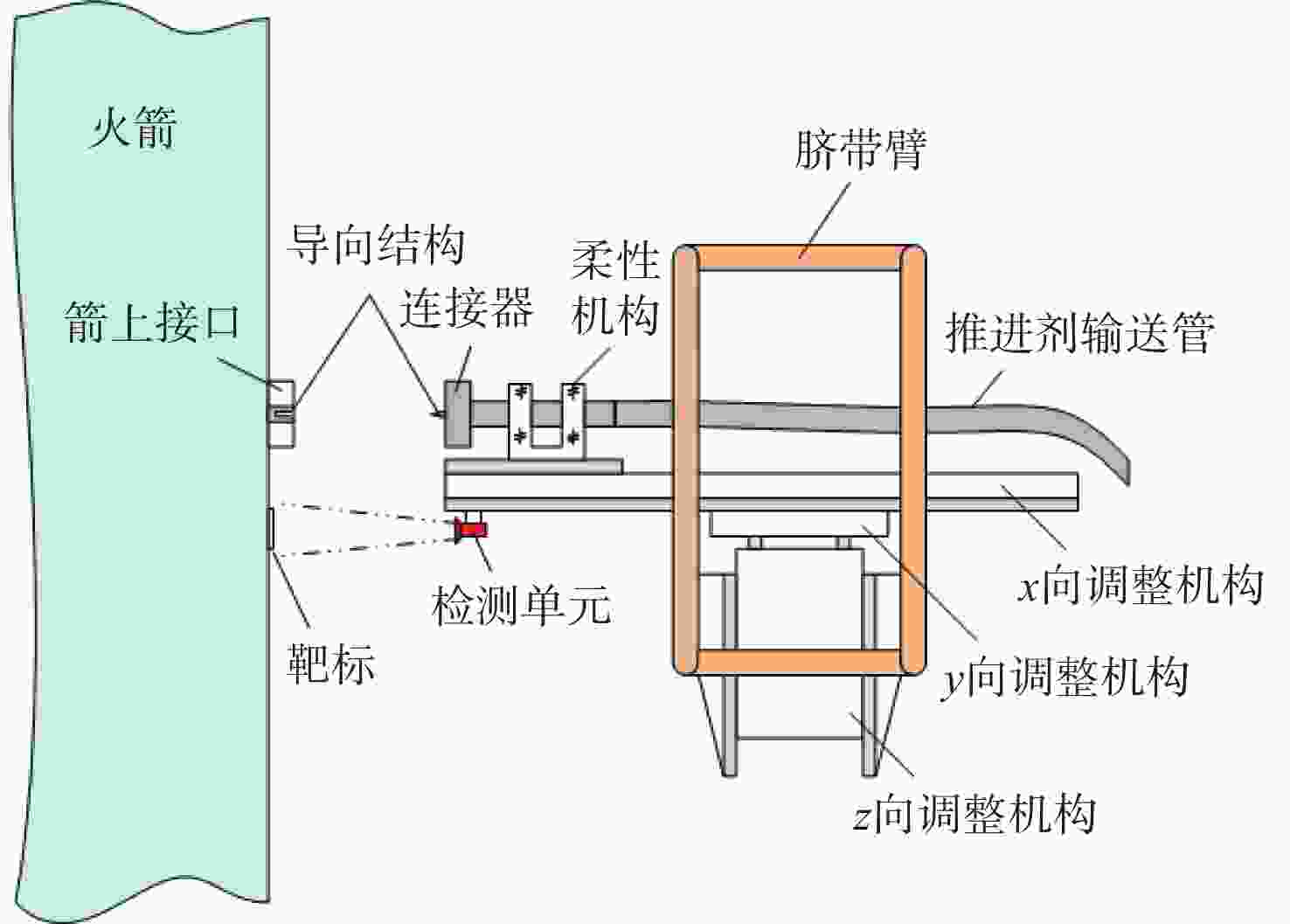
图 4 自动对接装置技术方案图
Figure 4. Technical scheme of umbilical connector automatic docking device
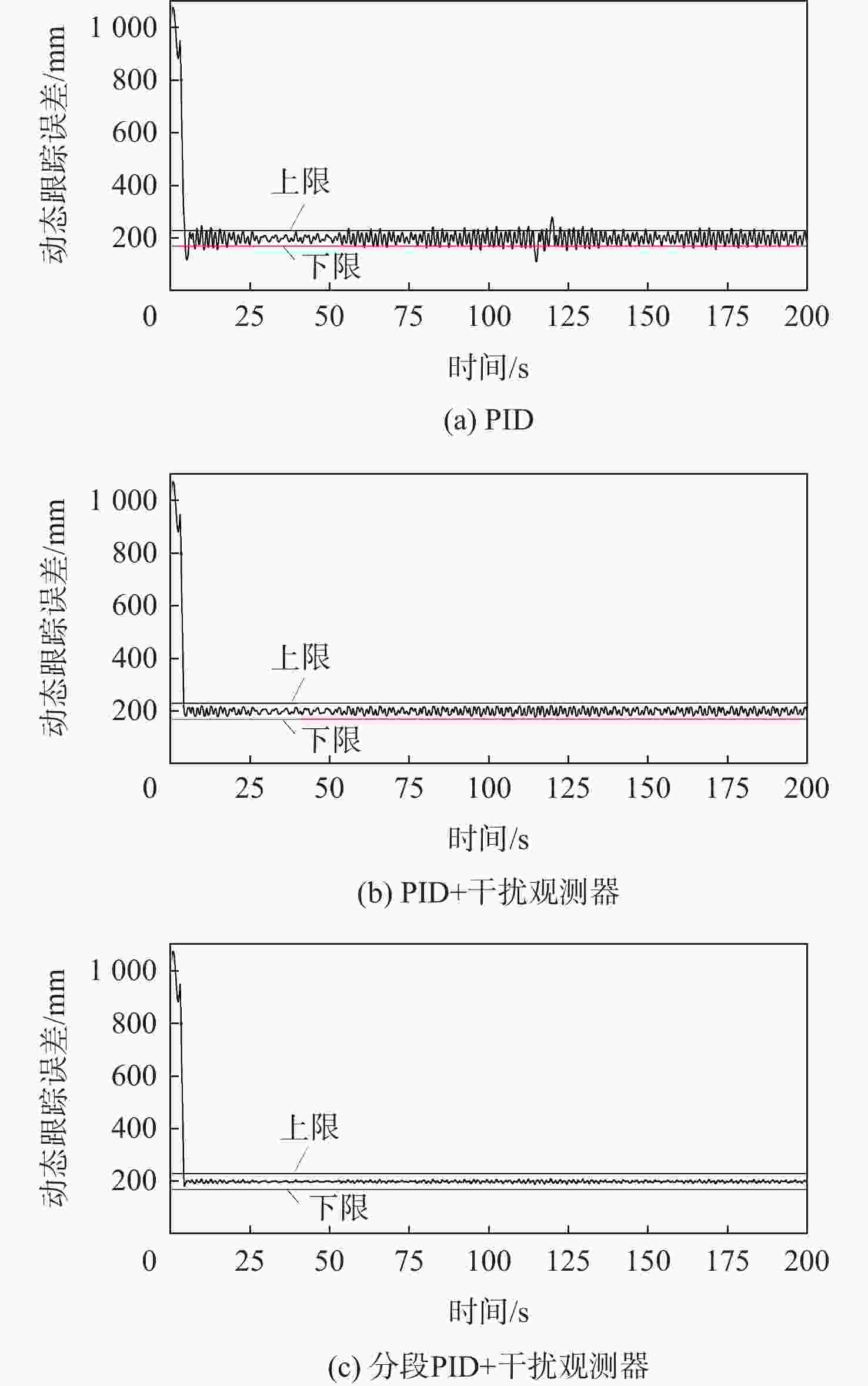
图 6 不同控制策略下跟踪误差对比
Figure 6. Comparison of tracking errors under different control strategies
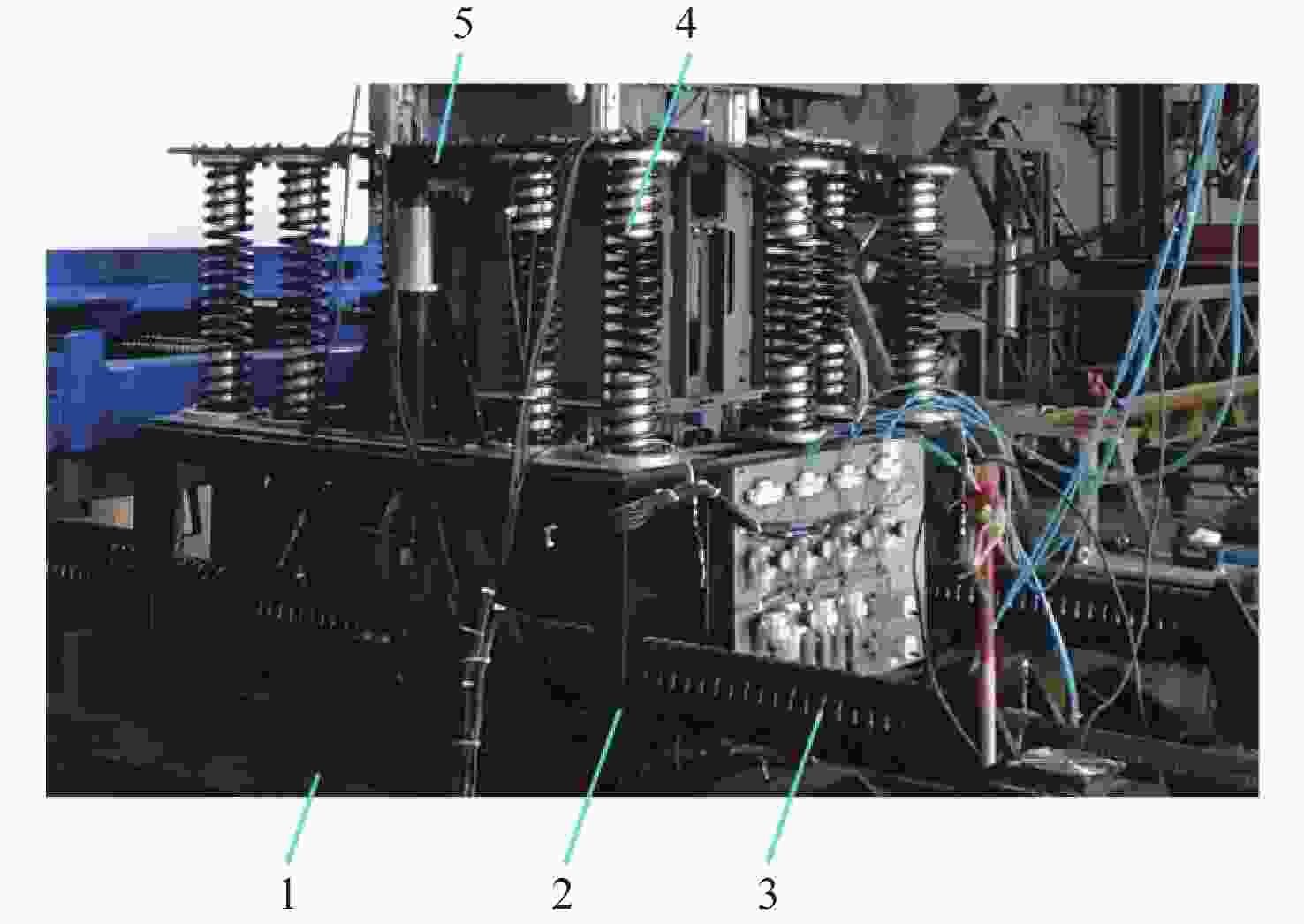
图 7 脐带臂模拟装置
1. 底座; 2. 水平移动座; 3. 水平弹簧组;4. 垂直弹簧组;5. 对接装置安装座。
Figure 7. Analog device of umbilical arm

图 8 脐带臂模拟装置摆动位移理论、试验值对比
Figure 8. Comparison between theoretical and experimental swinging displacements of umbilical arm
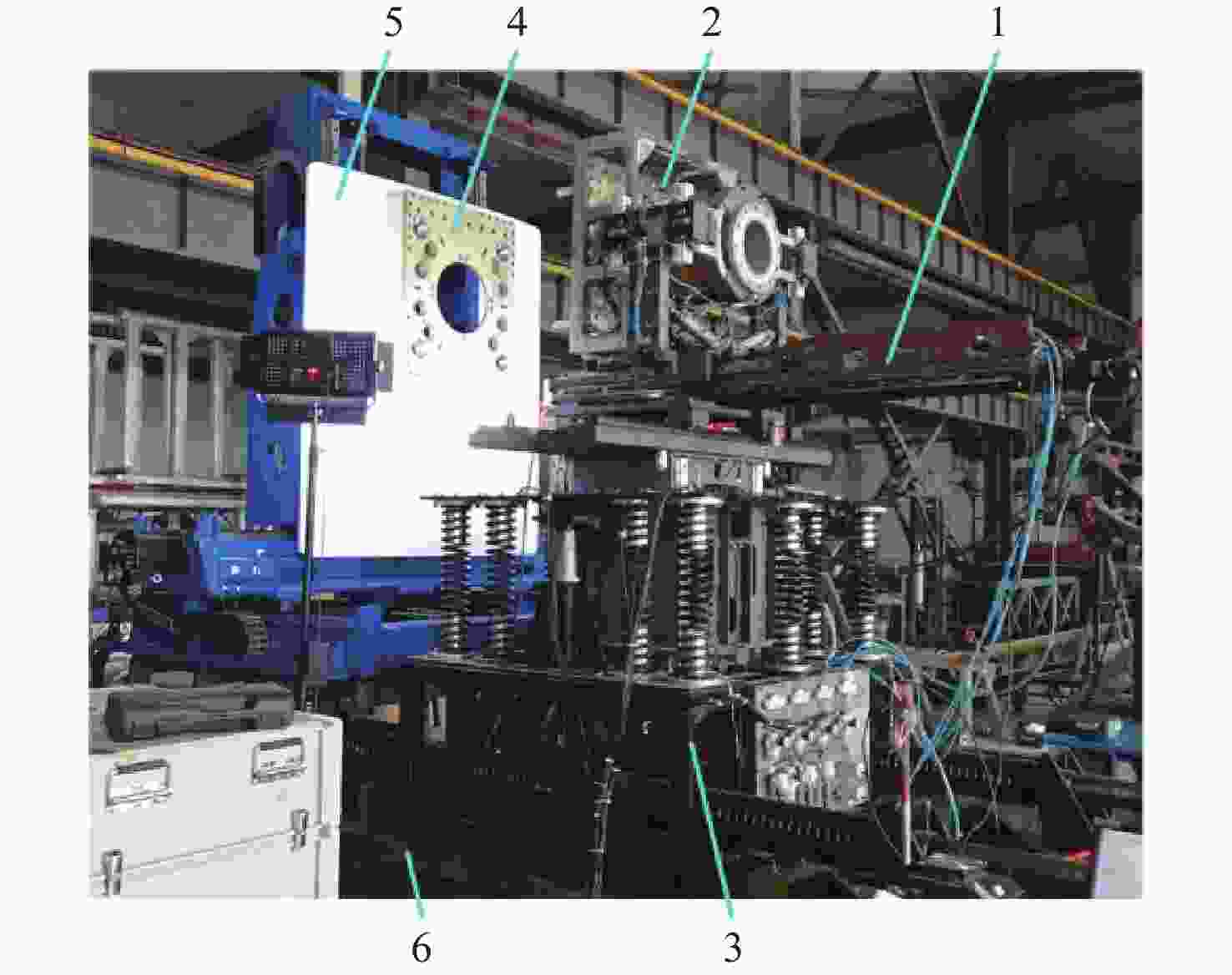
图 9 自动对接联合试验系统
1. 自动对接装置; 2. 连接器; 3. 脐带臂模拟装置; 4. 箭上接口; 5. 箭体模拟运动台; 6. 底座。
Figure 9. Automatic docking co-experimental system
-
[1] 何家声. 航天发射地面支持技术[M]. 北京: 北京理工大学出版社, 2015.HE J S. Space launch ground support technology[M]. Beijing: Beijing Insititute of Technology Press, 2015(in Chinese). [2] 符锡理. 运载火箭脐带自动脱落连接器[J]. 国外导弹与航天运载器, 1988(9): 60-67.FU X L. Automatic drop connector for umbilical cord of launch vehicle[J]. Missiles and Space Vehicles, 1988(9): 60-67(in Chinese). [3] DANDAGE S R, HERMAN N A, GODFREY S E, et al. Design and development of the space shuttle tail service masts: NASA-1979-21357[R]. Washington, D. C. : NASA, 1979. [4] National Aeronautics and Space Administration. The perfect mate for safe fueling[EB/OL]. (2004-01-01)[2016-03-20]. http://spinoff.nasa.gov. [5] GOSSELIN A M. Automated ground umbilical systems (AGUS) project: NASA-20130011368[R]. Washington, D. C. : NASA, 2007. [6] MANLEY W C, TAMASY G J, MALONEY P. Ares I linear mate umbilical plate and collet: NASA-N20130008828[R]. Washington, D. C. : NASA, 2012. [7] 白文龙, 李泳峄, 翟旺, 等. 运载火箭连接器自动对接技术应用分析[J]. 导弹与航天运载技术, 2017(6): 65-71.BAI W L, LI Y Y, ZHAI W, et al. Application analysis of automated mating technique used on launch vehicle filling connectors[J]. Missiles and Space Vehicles, 2017(6): 65-71(in Chinese). [8] 李泳峄, 吴新跃, 翟旺, 等. 基于柔性直角坐标机器人的火箭连接器自动对接过程分析及试验[J]. 导弹与航天运载技术, 2019(1): 116-121.LI Y Y, WU X Y, ZHAI W, et al. Analysis and experiment on the launch vehicle’s umbilical connector autonomous mating process based on flexible rectangular robot[J]. Missiles and Space Vehicles, 2019(1): 116-121(in Chinese). [9] 李泳峄, 翟旺, 张国栋, 等. 火箭推进剂输送连接器自动对接装置及其动态特性研究[J]. 机床与液压, 2020, 48(4): 13-18.LI Y Y, ZHAI W, ZHANG G D, et al. Research on dynamic characteristics of the autonomous mating equipment of launch vehicle’s umbilical connector[J]. Machine Tool & Hydraulics, 2020, 48(4): 13-18(in Chinese). [10] 李泳峄, 吴新跃, 李道平, 等. 运载火箭气液组合连接器动态自动对接技术[J]. 北京麻豆精品秘 国产传媒学报, 2021, 47(9): 1774-1779.LI Y Y, WU X Y, LI D P, et al. Dynamic automatic docking technology of gas-liquid composite umbilical connector for launch vehicle[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(9): 1774-1779(in Chinese). [11] 黄小妮, 顿向明, 张育林, 等. 运载火箭推进剂加注自动对接与脱离机器人本体设计[J]. 机器人, 2010, 32(2): 145-149. doi: 10.3724/SP.J.1218.2010.00145HUANG X N, DUN X M, ZHANG Y L, et al. The auto-docking and auto-separating mechanism designed for the rocket fuel loading[J]. Robot, 2010, 32(2): 145-149(in Chinese). doi: 10.3724/SP.J.1218.2010.00145 [12] 游嘉伟, 顿向明, 山磊, 等. 运载火箭推进剂加注机器人机构设计[J]. 机电一体化, 2016, 22(4): 41-44.YOU J W, DUN X M, SHAN L, et al. Mechanism design of carrier rocket propellant filling robot[J]. Mechatronics, 2016, 22(4): 41-44(in Chinese). [13] 张鑫, 李志刚, 徐华, 等. 运载火箭自动对接连接器液压系统研究[J]. 兵器装备工程学报, 2016, 37(3): 146-150. doi: 10.11809/scbgxb2016.03.035ZHANG X, LI Z G, XU H, et al. Research of hydraulic system of automatic butt-joint connector for carrier booster[J]. Journal of Ordnance Equipment Engineering, 2016, 37(3): 146-150(in Chinese). doi: 10.11809/scbgxb2016.03.035 [14] 原浩, 赵希梅. 一种双轴直驱平台新型同步渐近跟踪控制设计[J]. 机械工程学报, 2023, 59(5): 271-279. doi: 10.3901/JME.2023.05.271YUAN H, ZHAO X M. Design of a novel synchronous asymptotic tracking control for dual axis direct drive platform[J]. Journal of Mechanical Engineering, 2023, 59(5): 271-279(in Chinese). doi: 10.3901/JME.2023.05.271 [15] 姜尚, 田福庆, 梁伟阁, 等. 基于干扰观测器与模糊前馈补偿的随动系统PID控制策略[J]. 火炮发射与控制学报, 2017, 38(2): 29-34.JIANG S, TIAN F Q, LIANG W G, et al. PID control strategy of servo system based on disturbance observer and fuzzy feed-forward compensation[J]. Journal of Gun Launch & Control, 2017, 38(2): 29-34(in Chinese). [16] 尹增愿, 蔡远文, 任元, 等. 磁悬浮转子状态反馈解耦自抗扰控制方法[J]. 北京麻豆精品秘 国产传媒学报, 2022, 48(7): 1210-1221.YIN Z Y, CAI Y W, REN Y, et al. Decoupled active disturbance rejection control method for magnetically suspended rotor based on state feedback[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(7): 1210-1221(in Chinese). [17] 居龙, 黎定仕, 王南, 等. 脉动风载荷下发射平台摆杆的动态响应研究[J]. 工程机械, 2021, 52(2): 20-25. doi: 10.3969/j.issn.1000-1212.2021.02.006JU L, LI D S, WANG N, et al. Dynamic response research on umbilical arm of launch platform under stochastic wind load[J]. Construction Machinery and Equipment, 2021, 52(2): 20-25(in Chinese). doi: 10.3969/j.issn.1000-1212.2021.02.006 [18] 邱惠清, 吴志君. 集装箱起重机的脉动风场仿真及响应分析[J]. 振动 测试与诊断, 2013, 33(1): 44-48.QIU H Q, WU Z J. Simulation of fluctuating velocity field and response analysis of container crane[J]. Journal of Vibration, Measurement& Diagnosis, 2013, 33(1): 44-48(in Chinese). [19] 董霞, 陈康宁, 李天石. 机械控制理论基础[M]. 西安: 西安交通大学出版社, 2005.DONG X, CHEN K N, LI T S. Theoretical basis of mechanical control[M]. Xi’an: Xi’an Jiaotong University Press, 2005(in Chinese). -

 下载:
下载:









 点击查看大图
点击查看大图

计量
- 文章访问数: 222
- HTML全文浏览量: 92
- PDF下载量: 6
- 被引次数: 0
